以下内容来自小六的机器人AI学习圈(6年积累,全国最大的机器人SLAM交流社区,为SLAM行业从业者提供从入门、学习、交流、求职、线下链接、合作、咨询、答疑等一系列的服务)知识星球每日更新内容
【Non-convex Pose Graph Optimization in SLAM via Proximal Linearized Riemannian ADMM】
文章链接:[2404.18560] Non-convex Pose Graph Optimization in...
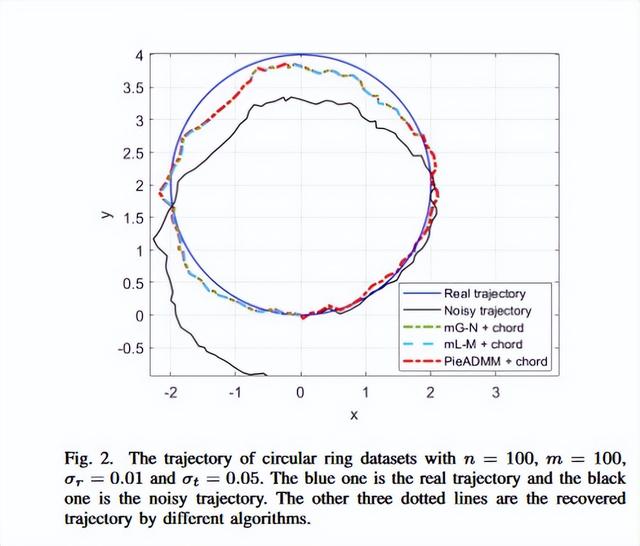
位姿图优化( Pose graph optimization,PGO )是解决基于姿态同时定位与地图构建( Simultaneous localization and mapping,SLAM )问题的著名技术。本文用单位四元数和三维向量来表示旋转和平移,并基于von Mises - Fisher分布提出了一种新的PGO模型。由单位四元数导出的约束为球面流形,对约束的投影可以通过归一化计算得到。然后,开发了一种近似线性化的黎曼交替方向乘子法( PieADMM )来求解所提出的模型,该方法不仅具有较低的内存需求,而且可以并行更新位姿。此外,我们建立了PieADMM的迭代复杂度为O ( 1 / ε2 ),以找到模型的ε稳态解。通过在两个合成数据集和四个3D SLAM基准数据集上的数值实验证明了我们提出的算法的有效性。








推荐阅读
MetaCam EDU 正式发售!应用于机器人定位导航、实景三维重建等,让研发之路,畅通无阻!隧道低纹理大摆锤,暴力SLAM!暴力升级!暗黑隧道极限测试SLAM!效果哇塞!3D高斯泼溅来实景重建公园!全面启动!全国线下试用报名!MetaCam EDU 产品功能及细节详细介绍MetaCam EDU 实机展示和操作基于MetaCam EDU的二次开发流程及说明