以下内容来自小六的机器人AI学习圈(6年积累,全国最大的机器人SLAM交流社区,为SLAM行业从业者提供从入门、学习、交流、求职、线下链接、合作、咨询、答疑等一系列的服务)知识星球每日更新内容
【Gaussian Process-based Traversability Analysis for Terrain Mapless Navigation】
文章链接:http://arxiv.org/abs/2403.19010
作者单位:印第安纳大学
项目主页:GitHub - abeleinin/gp-navigation: Gaussian Process...
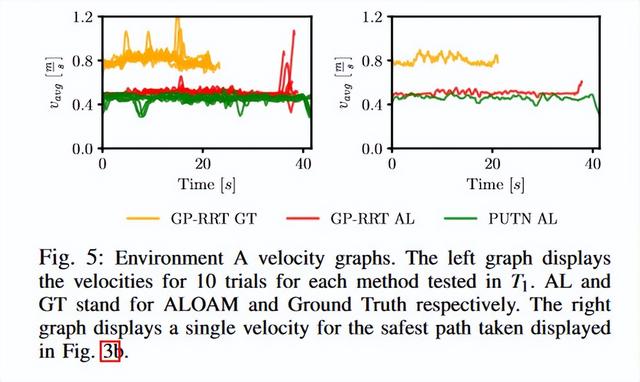
对于自主机器人来说,通过不平坦的地形进行有效的导航仍然是一项具有挑战性的工作。结合稀疏高斯过程( SGP )局部地图和快速探索随机树( RRT * )规划器,提出了一种新的基于几何的非平坦地形无地图导航框架。我们的方法从生成高分辨率的SGP局部地图开始,提供了机器人即时环境的插值表示。该地图捕捉了关键的环境变化,包括高度、不确定性和坡度特征。随后,我们基于SGP表示法构建了一个可通行性图来指导我们的规划过程。RRT *规划器高效地生成实时导航路径,避免了为追求目标而穿越不可穿越的地形。这种基于SGP的地形解释和RRT *规划的结合,使地面机器人能够安全地在具有变化高度和陡峭障碍物的环境中航行。我们通过稳健的仿真测试评估了我们提出的方法的性能,突出了与现有方法相比,它在实现安全和高效导航方面的有效性。






推荐阅读
3D高斯泼溅 为什么能一直火?有哪些应用场景?香港大学开源的这个激光雷达惯性SLAM,太强了!一招掌握3DGS基础视觉三维重建!深度计算+点云处理+网格重建优化+纹理贴图!谷歌这个SLAM开源方案,造福了整个机器人行业!重大变革!NeRF和3D高斯喷溅如何重塑SLAM?发顶会顶刊不再难!多传感器融合SLAM、生成式AI、3DGS、NeRF、标定等方向这个开源框架,造福了无数卫星定位研究者和初创公司!BOSS:用了机器人仿真,立省几十万自动驾驶中的GNSS、RTK到底多重要?太强了!世界第一款开源的自动驾驶一体化框架Autoware!(附交流群)如何从零开始搭一套自己的SLAM系统?17讲全部上线!全网首个详解深度学习特征开源算法SuperPoint和SuperGlue(附交流群)最炸裂的机器人AI技术教程都在这了!