为了加速人形机器人的算法研究,一个来自伯克利大学的研究团队,提出了一个高纬模拟机器人学习基准HumanoidBench。
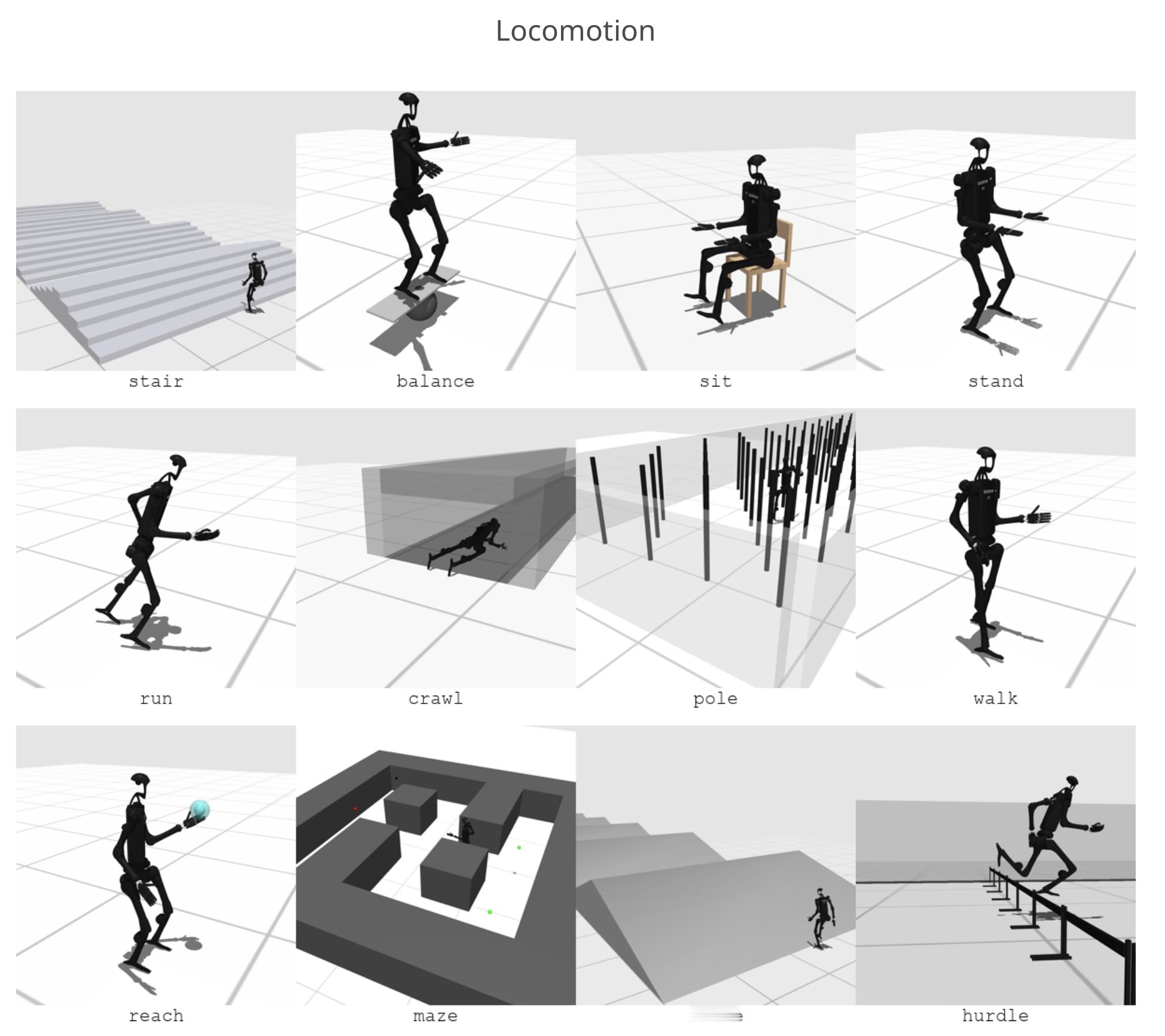
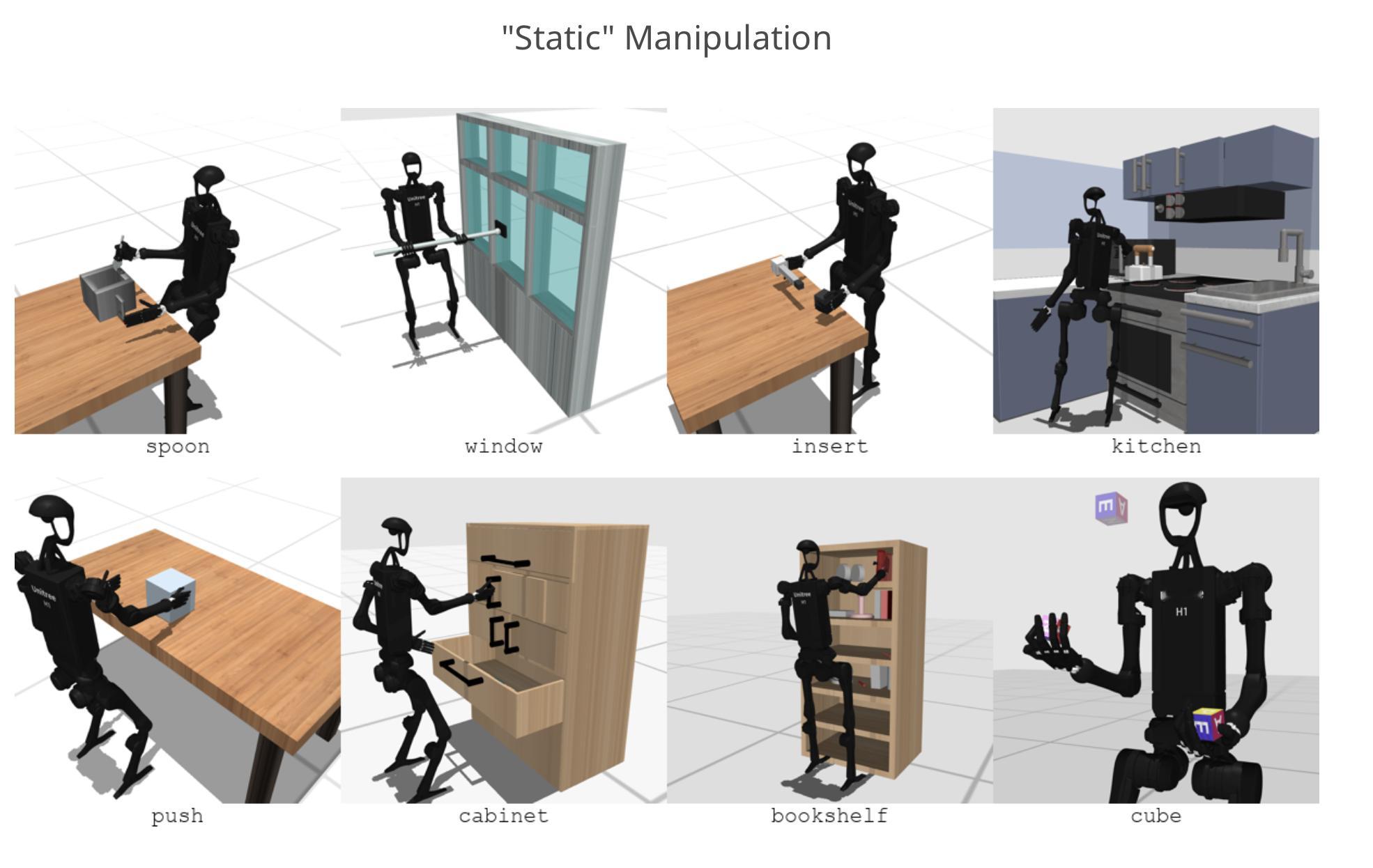
HumanoidBench包含了27种不同的全身任务,为机器人社区提供了一个平台,以识别使用人形机器人解决各种任务时出现的挑战,从而促进算法和想法的及时验证。
初步研究表明,现有的最先进的强化学习算法难以处理HumanoidBench中呈现的复杂任务,而分层学习基线(hierarchical learning baseline)在强大的低级策略(例如行走或伸手)的支持下可以实现卓越的性能。
详见: