车位到车位
最开始的单车道智驾,如跟车巡航,LCC,AEB,发展到后面的跨车道智驾,如AES,如高速/高架上的自动变道超车,再发展到城市NOA,能够完成地图导航情况下的点到点。
智驾发展迅速,一直到华为现在的车位到车位,在平时地图导航涉及不到的停车位(如地下车库,小区内部)也融入进了智驾。
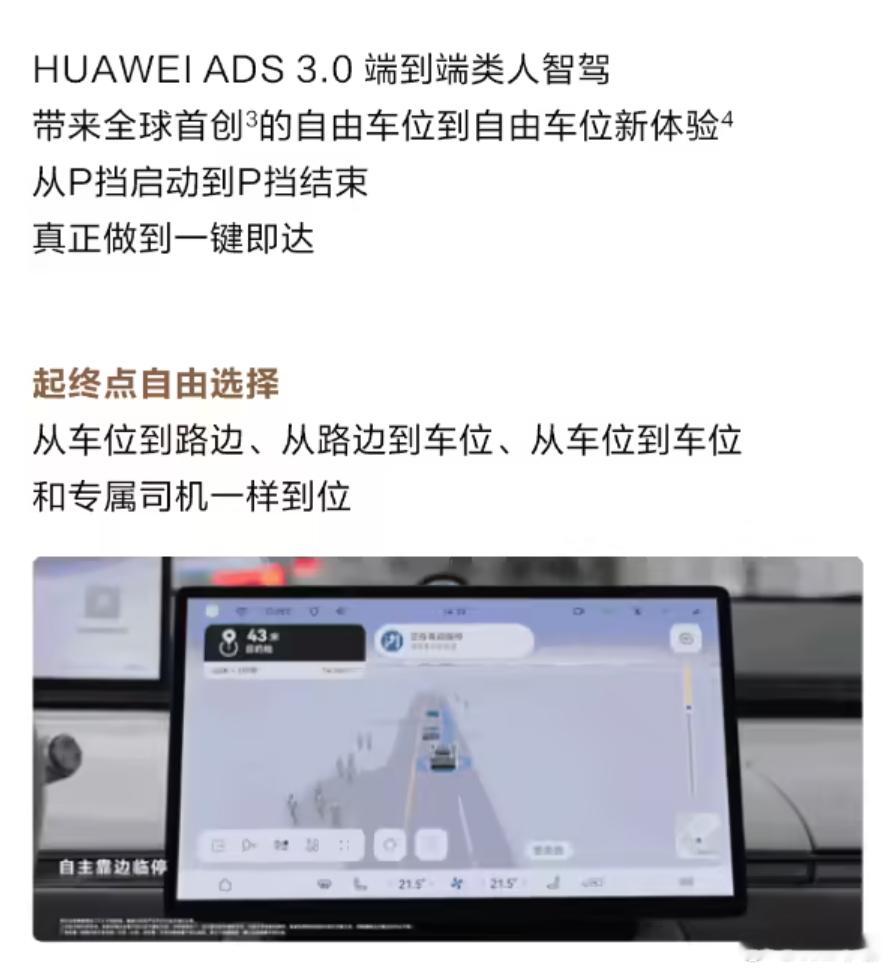
华为乾崑ADS3.0的端到端智驾再次升级,这次从起始的车位就能激活智驾,从车位出发,可以自主泊出,自主在没有大地图导航的开出停车场,并自主等待/驶出闸机。
而后面的城区智驾也做了优化,例如对施工场景进行了优化,在施工路段不易通行的情况下,NCA会自主选择更优路线,在经过施工路段时,智驾的避障换道能力也会更强。
而到了另一端的停车场,还拥有VPD泊车代驾功能(支持分屏显示2D/3D视图,支新增智能车灯泊车灯语),系统在无人驾驶的情况下,在停车场内进行安全会车,倒车让行,行人礼让,绕行障碍物,实现真正的从出发车位到停泊车位的全程智驾功能。
华为智驾的车位到车位的升级还新增了ADS 3D试图,支持显示了限高杆、快递员、外卖员模型。新增了后视摄像头清洗提示,AR-HUD智驾减速效果。
这次华为乾崑智驾重磅升级,将会再次确定华为智驾的领先地位,希望其他品牌的智驾也能快速赶上了。


汪汪白话
今天升级了。怎么用不起车位到车位?停车位智驾也不行。吹的?