以下内容来自小六的机器人AI学习圈(6年积累,全国最大的机器人SLAM交流社区,为SLAM行业从业者提供从入门、学习、交流、求职、线下链接、合作、咨询、答疑等一系列的服务)知识星球每日更新内容
【HVOFusion: Incremental Mesh Reconstruction Using Hybrid Voxel Octree】
文章链接:[2404.17974] HVOFusion: Incremental Mesh Reconstru...
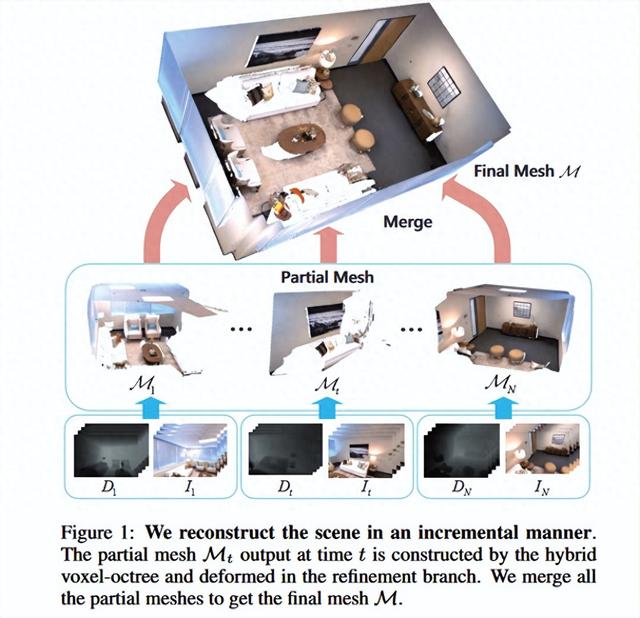
增量式场景重建对于机器人导航至关重要。大多数传统的方法通常使用TSDF (截断符号距离函数)体积或神经网络来隐式地表示表面。由于体素表示或涉及耗时的采样,它们在平衡速度、内存存储和表面质量方面存在困难。在本文中,我们提出了一种新的混合体素-八叉树方法,以有效地融合八叉树和体素结构,从而可以同时利用隐式曲面和显式三角网格表示。这样的稀疏结构保留了叶子节点中的三角面片,并依次产生部分网格用于增量重建。这种存储方案允许我们在显式的3D空间中自然地优化网格,以获得更高的表面质量。我们向目标迭代地变形网格,并通过优化着色模型来恢复顶点颜色。在多个数据集上的实验结果表明,我们提出的方法能够快速准确地重建出具有真实色彩的场景。