科学家在实验室发现某种现象后,通常会尝试用教科书中的某种定义来解释相关现象。但是,如果教科书没办法解释该怎么办呢?
11 年前,彼时还在浙江大学读博的谷付星发现了一种奇特的现象,在微光纤上的金纳米线竟然朝着相对光传播的方向“倒着走”。并且,这种现象用常规的激光捕获原理并不能解释清楚。

图丨谷付星(来源:谷付星)
2013 入职上海理工大学后,谷付星教授与团队继续深入探索,终于在 10 年后以光热冲击效应为基础,开发了激光捕获技术称之为“光热冲镊(Photothermal-Shock Tweezers)”,实现了固体界面上对微纳物体的捕获及任意操控。
由于在真空和液体中的广泛应用,光学捕获物体的激光冷却和捕陷原子的技术和光学镊子分别在 1997 及 2018 年获得诺贝尔物理奖。但是,光学捕获物体在固体接触表面上仍是“空白”。
谷付星表示:“光热冲镊技术的出现填补了该领域的空白,让激光在‘海陆空三界(真空/气体,液体及固体)’的微纳环境中,能够全部实现捕获和操控任意物体。”
研究人员探索了在纳米机器人领域的应用,并实现世界首个像传统机器人那样工作的纳米清洁机器人。与此同时,他们也研制了结构更复杂、功能更多样的 HOUbot 机器人,该机器人是世界首个利用传统机械手段执行具体任务的纳米机器人。

图丨相关论文(来源:Nature Communications)
近日,相关论文以《通过光热冲击在干固体接触条件下产生强大推力的自主纳米机器人》(Autonomous nanorobots with powerful thrust under dry solid-contact conditions by photothermal shock)为题发表在 Nature Communications 上[1]。
上海理工大学博士研究生顾兆麒、朱润琳和沈天赐为论文共同第一作者,谷付星教授为论文通讯作者。
图丨从左至右分别为:上海理工大学博士研究生沈天赐、顾兆麒和朱润琳(来源:上海理工大学)
2012 年 5 月 4 日,谷付星第一次发现金属纳米线朝着相对光传播的方向“倒着走”的现象。在经过研究近 10 年的海量实验数据后,终于确定了激光的捕获方式和机理。
“我还记得在 2022 年疫情封控期间,我带着被子住到实验室每天做实验,那段时间研究进展非常快。”谷付星说。
2021 年,该课题组在 Nature Communications 发表过一篇关于微光纤上驱动金属纳米线的论文,为本次研究奠定了基础,但是离捕获原理还有“一步之遥”。

图丨通过冲量-动量定理原理实现强大力输出的示意图(来源:Nature Communications)
实际上,光被物体吸收的一瞬间,纳米线的热膨胀和移动就已经完成。这种瞬态移动的现象用传统教科书中的振动力学来解释并不可行。
在本次研究中,结合热弹性力学、动力学、摩擦学,研究人员提出一种新概念,并确定了奇特现象背后的物理是瞬态热弹性动力学。并且,首次在国际上推导、归纳出瞬态热梯度力的相关方程式。“它的适用条件是,光脉冲的持续周期远小于它振动的周期。”谷付星说。

图丨光热冲镊操控纳米线(来源:Nature Communications)
传统机器人基本被限制在几百微米尺度,与其配套的电机和能源驱动系统往更小型化发展也充满挑战。光热冲镊技术的出现,也有望解决纳米机器人领域中的磨损、吸附等问题,因此增加了更广泛的应用场景。
具体来说,光热冲镊技术能够用于实验室操控微纳物体。与传统的手工操控相比,该技术会极大地提升效率。另一方面,光热冲镊技术相当于提供了一种小型化的“马达”,可节省质量体系成本,在航空航天、无人机、潜水艇等方面都具有应用前景。
谷付星表示:“未来我们也计划与光纤技术结合,探索微创手术的应用方向。让内窥镜更小、更细,从而能够直接伸入到血管、肺、大脑等人体器官。”
从获得诺贝尔奖的光学捕获技术来看,从技术被开发到实际应用经历了约十年时间。因此,光热冲镊技术到实际应用还需要时间和技术的不断发展。
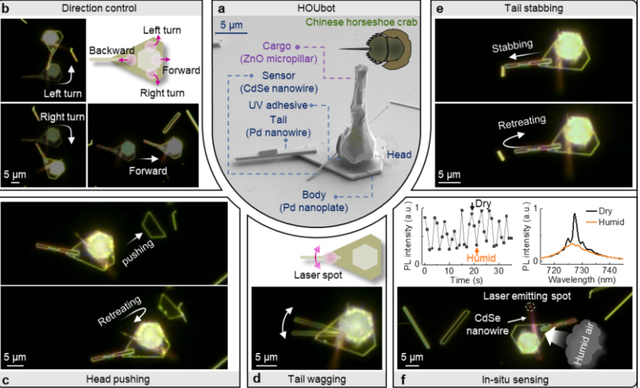
图丨纳米机器人 HOUbot 的相关原理示意图(来源:Nature Communications)
目前,控制纳米物体开环在 1 纳米左右,反馈控制闭环在约 80 纳米。下一步,该团队计划通过人工智能和机器视觉技术,继续提升控制精度和灵敏度。
另外,研究人员还打算制备“纳米操作手”,并正在探索通过空间光调至器实现多手协同操控的效果。据悉,该技术已申请三项国内专利,相关国际专利正在申请中。
参考资料:
1.Gu, Z., Zhu, R., Shen, T. et al. Autonomous nanorobots with powerful thrust under dry solid-contact conditions by photothermal shock. Nature Communications 14, 7663 (2023). https://doi.org/10.1038/s41467-023-43433-6
运营/排版:何晨龙