遥遥领先源自于“顶配智驾”,阿维塔:三激光雷达才是最优解!
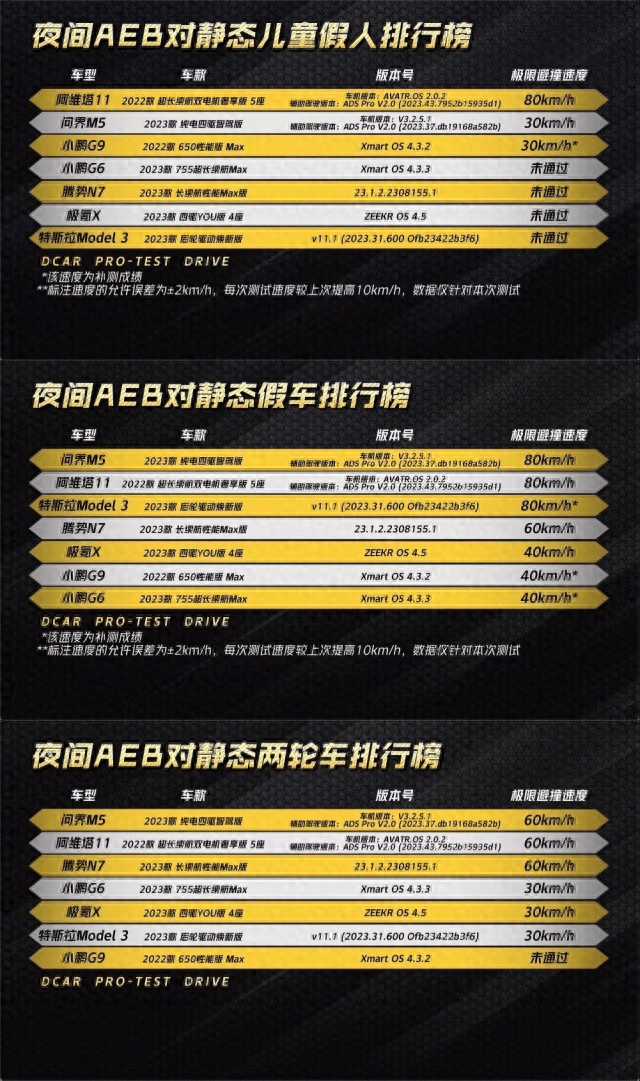
前段时间,在懂车帝一次全网直播的夜间AEB测试之后,全网关注的何小鹏和余承东的AEB之争终于告一段落,以何小鹏“服软”告终。但有趣的是,在这场测试中不仅仅是小鹏完败问界,而是由一位“题外人”阿维塔11凭借先进的主动安全技术取得了最优秀的AEB表现,一跃成为本次行业及社会热点事件中的焦点车型。
那么,阿维塔11的智能驾驶在当下是怎样的水准?又有怎样智驾能力满足用户对于智能驾驶体验的核心痛点?且看佳鑫的分析。
1、硬件感知是高阶智驾的核心支撑!
抱歉,对智能驾驶来说,硬件多还真就代表着为所欲为。
在这里佳鑫先简单科普一下智能驾驶的原理:它其实和我们日常开车非常近似,车企的智能驾驶同样需要通过眼、脑、手这三个步骤来实现自动跟车、保持车道、选择路线等等,也就是先感知环境、再分析判断,最终车辆执行。

而硬件越多、硬件越强,也就代表着感知环境的能力越强。就很像一位老司机,视野往往会放得很远,能够很早就规划自己的路径;对后视镜的频繁观察,也能发现周围潜在的危险。
所以对智能驾驶来说,巧妇难为无米之炊,硬件是重中之重的基础。
而阿维塔11搭载了含3颗激光雷达在内的34颗智能驾驶传感器,是目前行业内最豪华的智能驾驶硬件组合,这才是阿维塔11能够脱颖而出的原因。

2、硬件之王——激光雷达
激光雷达在诸多硬件中,无疑是最强的那个。
它的工作原理是让激光通过扫描器单元形成光束角度偏转,光束与目标作用形成反射/散射的回波。当接收端工作时,可产生原路返回的回波信号光子到达接收器,接收端通过光电探测器形成信号接收,经过信号处理得到目标的距离、速度等信息或实现三维成像。
换句话说,激光雷达感知到的内容和人眼捕捉到的画面有所不同:激光雷达是能够看到物体的形状的,直接生成3D模型,而不是看到2D图,再“脑补”成3D模型。

因此作为一种主动式探测技术,车载激光雷达的探测精度可达厘米级别,具备高精度、高准确性的感知性能,实现的远距离探测、物体检测的能力,从而清晰地识别物体实现目标成像,比摄像头看得更远、更准,也不太会受到雨雪天气、大雾天气的影响,还能与毫米波雷达、摄像头等传感器数据结合,带来最完备的车辆感知能力。

而阿维塔11全系标配3颗华为激光雷达,它能利用905nm波段,实现水平探测角度120度,远距离150m,垂直视角25度。而前方1颗,前侧2颗的布局,也让其在行驶过程中拥有前方和两侧的广域探测面,提供超过300°的水平视野范围、强大的侧向3D空间感知能力以及高分辨、高置信度探测能力。

正因为有强大的硬件感知性能加持,令阿维塔11的高阶智驾在感知层面拥有精准的判断能力,并结合软件算法的深度训练,应对复杂道路环境也能从容驾驭,此前在懂车帝官方AEB“大考”测试中,阿维塔11在80km/h工况下能够做到提前感知,高效刹停的驾控操作,在一众竞品车型面前着实秀了一把“车技”,以全面占优的实力轻松拿捏!
3、软件的制胜法宝——向“无图”进阶
现阶段大部分智驾系统都十分依赖高精地图,但高精地图的缺点在于测绘需要严格的审批流程,很难在全国范围内迅速落地;此外还有大部分结构化道路并未实现高精地图覆盖,也就意味着大部分车企的智驾系统只能在“规定范围”内使用。而向“无图”进阶,成为了各家车企厂商的接下来的技术方向。
因此阿维塔11采用了独特的拟人化融合算法,在技术上采用了华为首创的GOD 2.0网络和RCR 2.0网络,也就是对通用障碍物的检测能力,以及对道路拓扑结构的实时推理能力。由此,阿维塔11能够借助激光雷达本身的感知能力、融合毫米波雷达、摄像头等传感器数据,识别自行车、行人鬼探头等标准障碍物和各类异形障碍物,大幅提升了智能驾驶的行车安全。

而且从配置来看,也不难看出阿维塔11对智能驾驶的重视程度。其全系标配3颗激光雷达,低配车型和高配车型在智驾上的表现完全一致;反观包括小鹏在内的其他品牌,则往往在顶配车型上才会搭载2颗、1颗激光雷达,低配车型甚至没有搭载激光雷达,智能驾驶的能力不可同日而语。

这也就意味着,对阿维塔而言,智驾是品牌底色;对某些品牌而言,智驾是营销工具。因此阿维塔11能在各项测试中都夺得“智驾天花板”的表现,也就不足为奇了。
