近期媒体报道,百度旗下自动驾驶出行服务平台「萝卜快跑」在武汉市的无人驾驶订单迎来了爆发式增长,百度港股股价也随之上涨超10%。但与此同时,网络上流传的萝卜快跑在红绿灯路口与一名行人发生碰撞的视频,也引发了人们对于无人驾驶行业的猜测和疑惑。
无人驾驶越来越广泛的现实运用,已然引发人们对新技术监管的思考,那么——谁能来替车辆管理人盯住“萝卜”的“快跑”监控平台呢?

2024年5月,百度Apollo Day发布全球首个支持L4级自动驾驶大模型Apollo ADFM,以及搭载第六代智能化系统解决方案的萝卜快跑无人车,同月,武汉市正式投入运营千辆萝卜快跑。
2024年7月,萝卜快跑武汉市订单量迎来爆发,单日单车峰值超20单,与出租车司机单日订单情况达到同一水平;总订单量已超过600万单,测试里程超1亿公里。车费价格对比:以武汉市10km路程为例,萝卜快跑车费4-16元,传统网约车18-30元。
百度预计萝卜快跑2024年底收支平衡,并在2025年实现盈利。
萝卜快跑无人驾驶出租车的商业模式已经在武汉跑通。
然而,无人驾驶出租车和智慧交通的兴起也带来了监管上的新挑战,尤其是责任划分问题较为突出。北京自动驾驶汽车条例(公开征求意见稿)提出:“在车内无驾驶人的情况下,车辆所有人、管理人将成为交通违法责任的主体”。这要求监管侧(车辆所有人 和 交通管理部门)的管理应用必须适应新的技术发展,提高监管能力和新技术应用能力。百度Apollo对智能场景,提出了“人、车、位置、环境、时间”5大维度。
那么,无人驾驶出租车和智慧交通又会对监管侧的管理应用提出哪些新的要求?

可能在今年,很多人会觉得城市信息模型(CIM)已经“蔫”了,没人用没人要了,其实不然,只是因为数字城市经过前两年的建设,逐渐进入应用覆盖阶段,以CIM城市为技术基底的城市空间管理,以后只会见到的越来越多而不会越来越少,将真正成为城市管理的可视化技术底座。CIMPro孪大师为智慧交通提供了强大的功能支撑。

与“萝卜快跑”无人驾驶出租车同期出现的技术概念是“通感一体化”和智慧交通,既车路协同概念,相比起以往经常遇到的固定单点成片的传感器和监控相机,“萝卜快跑”也对传统的监管平台提出更高的要求,因为车辆状态会结合路侧感知系统,为车辆实时呈现四周的道路环境和交通流信息,是通信与感知结合、运动车辆与固定传感器的结合,对数据流与空间的融合提出更高的要求。
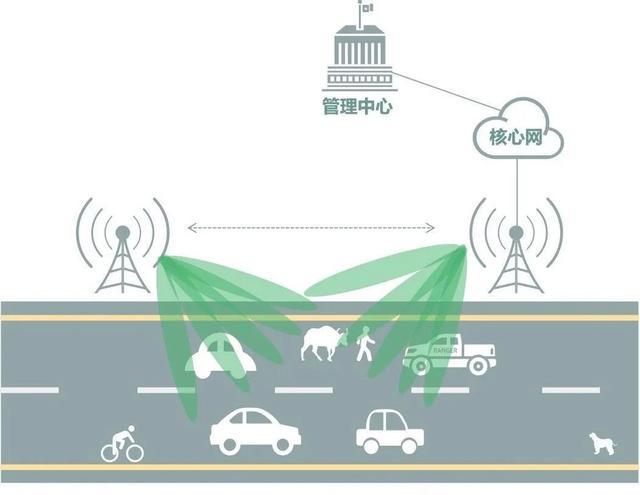
城市空间内高低不同位置的基站和传感器
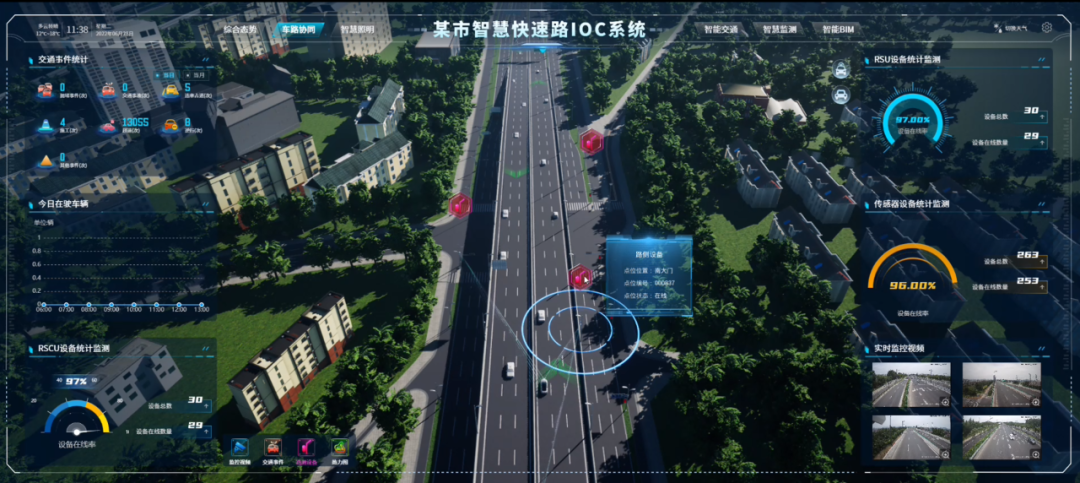
还原行车轨迹和行车历史场景通过车载高精度定位设备,智慧交通实时捕获无人驾驶出租车的地理位置信息,将行车视频数据与车辆模型相结合,在CIM城市环境中以跟随模式展示,车辆模型的移动与行车视频同步。在需要时,通过CIMPro孪大师智慧交通系统调阅和回溯车辆的历史行车轨迹和相应的行车视频,提供详尽的历史场景还原。
CIMPro孪大师所提供的多维度展示功能,使交通事故处理时,交警、保险、车辆管理方,都能够从不同角度审视车辆的行驶状态,包括被记录下来的速度、加速度以及周边交通环境等。智慧交通的综合信息展示能力为交通管理、城市规划、以及保险理赔等领域提供了强大的可视化数据支持和决策依据。

行车轨迹

车后视角
自由强大的场景编辑功能快速还原交通事故现场CIMPro孪大师智慧交通提供了自由强大的场景编辑功能,能够快速还原交通事故现场。通过参考行车记录视频和附近的交通监控视频,可以快捷地搭建交通事故现场,为事故分析和处理提供了便利。

城市交通场景、事故车辆摆放
无人驾驶出租车和智慧交通的发展,不仅为公众提供了新的出行方式,也对监管侧的管理应用提出了新的挑战。以CIM城市为技术基底,以CIM城市空间容纳通感一体化带来的立体感知和通信网络,CIMPro孪大师为无人驾驶出租车和智慧交通的监管提供了强大的技术支持,有助于提高监管效率,服务道路交通管理。在行为现象和监管手段相互适应、磨合、升级的基础上,无人驾驶出租车有望在未来的智能交通体系中发挥更大的作用。
