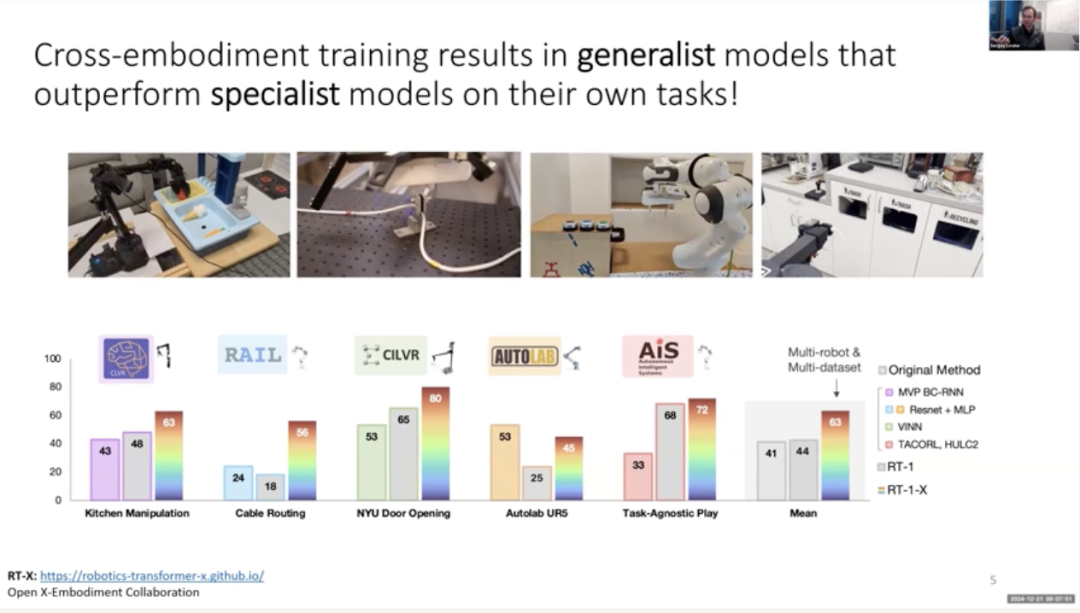
看了 Sergey Levine 在 DAI 2024 上的演讲,他们用了 34 个实验室涵盖 22 种不同类型机器人超过 500 种不同任务的数据训练出来一个 33 亿参数的 VLA 模型 RTX,然后把这个模型送回给其中 7 个实验室,并请这些实验室对比 RTX 和他们开发的专用任务模型。
对比结果显示,RTX 比那些专用模型中的大约 50%,都要更好。
虽然不是全方位胜出(考虑到数据集和模型规模,这是可以接受的),但这个实验证明了一个非常重要的结论:一个吸收多种任务多种场景的通用模型,最终会超越各种为限定场景开发的专用模型,展示出难以置信的泛化能力。
这个范式已经在各个领域发生,在机器人领域同样适用!