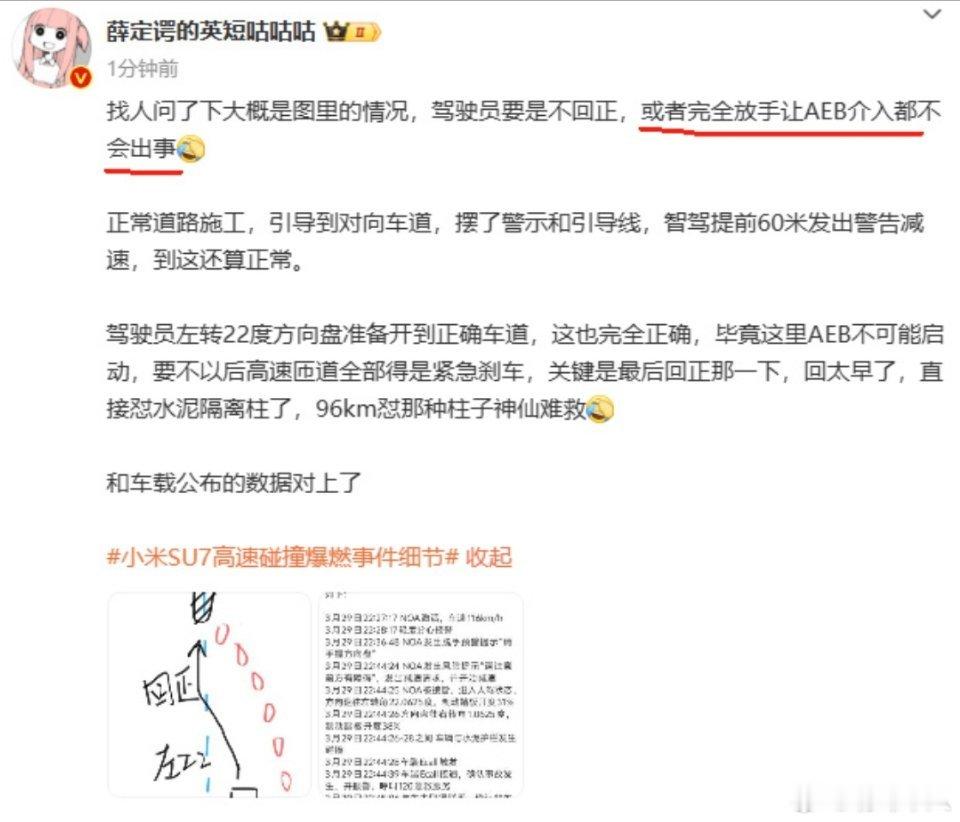
英短说“驾驶员要是不回正,或者完全放手让AEB介入都不会出事”。
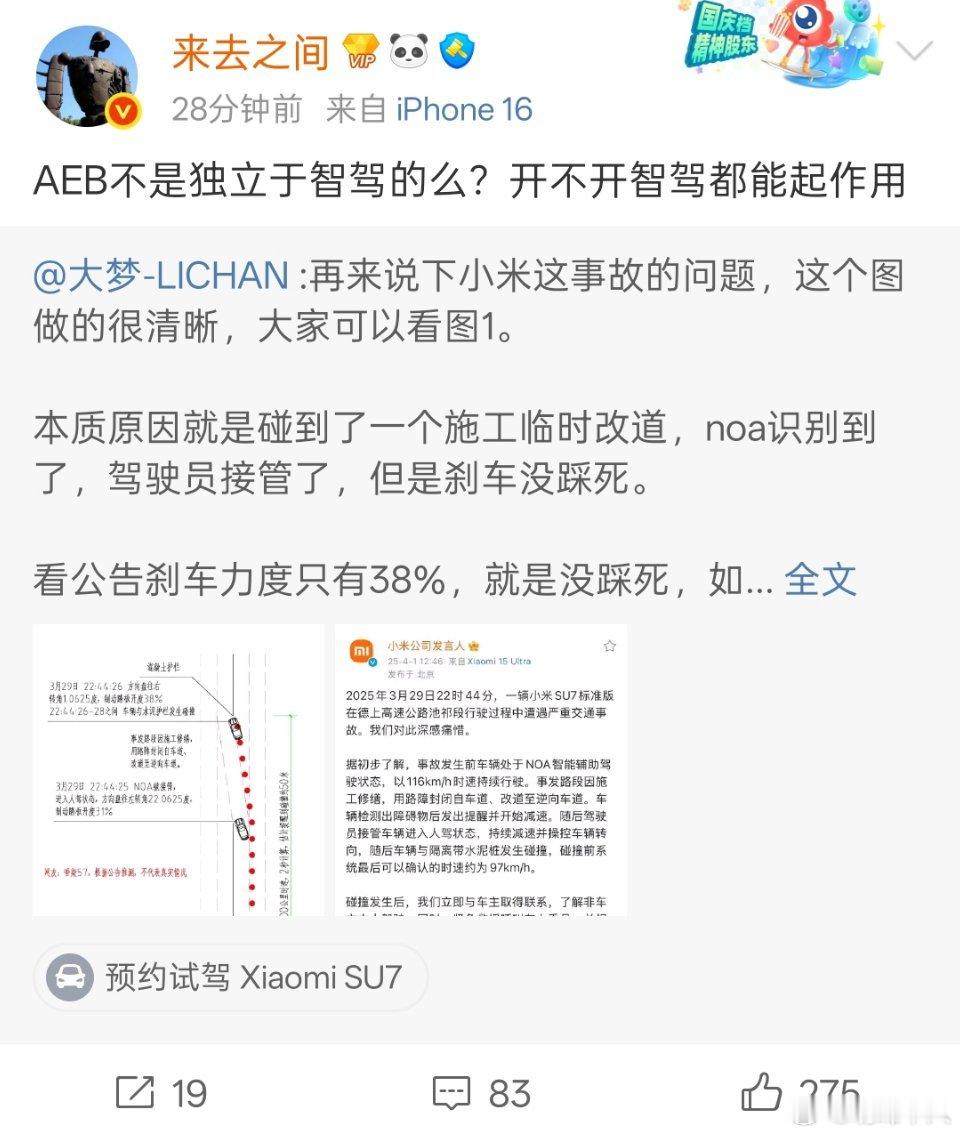
我跟来总的疑惑一样,小米SU7的AEB机制究竟是怎么样的?AEB是独立于智驾的吗?如果达到触发条件,就算是人驾AEB也会触发吗?AEB在多大的车速范围内能生效?
英短说“驾驶员要是不回正,或者完全放手让AEB介入都不会出事”。
我跟来总的疑惑一样,小米SU7的AEB机制究竟是怎么样的?AEB是独立于智驾的吗?如果达到触发条件,就算是人驾AEB也会触发吗?AEB在多大的车速范围内能生效?
评论列表
猜你喜欢

作者最新文章
热门分类
科技TOP
科技最新文章
![北方某地最新卫星图[并不简单]除了船坞旁边的模块更多外没太大变化[抠鼻]图源](http://image.uczzd.cn/2939533847058861508.jpg?id=0)



![最近没怎么看东方甄选直播,都是需要什么东西去自营号直播下个单就走了[比心]20](http://image.uczzd.cn/17489432043719589666.jpg?id=0)
一鸣
从根上说,就是辅助驾驶能力差,测距短、测不出来、判断运算不力,刹又刹不住,就给司机2S反应时间谁能做到!强烈让LEI总在原场地试试,他不死就是小姑娘问题了
過往隨風Float
洗地之始[滑稽笑] 四川手机报嗝屁了
用户10xxx22
接近100时速发生交通事故,黛妃的奔驰S600也没扛住啊!这两年发生的,林志颖特斯拉时速60碰撞起火,人撞晕车门自动锁死,要不是路人舍命砸车送医院抢救几天,他和儿子不也挂了,怎么没人去喷!百万雷克萨斯LX时速70国道碰撞起火,车门自动锁死,也是路人舍命砸车救出两人,一人被烧死,怎么也没人去喷?难道国货和国外品牌待遇不同,还是有人故意带节奏,一堆无脑喷子戏精上身?[静静吃瓜]
哼!萌个了卖
问题是在于这种在修路的高速根本不能算高速了,小米应该介入禁止启动noa功能 小米这块信息太滞后了 需要大模型加持
long
根据搜索结果,小米智驾系统对锥桶、水泥墩等障碍物的识别能力存在显著差异,具体取决于车型版本和硬件配置: 一、标准版(SU7 标准版)的局限性 1. AEB系统不响应施工障碍物 小米官方明确表示,标准版SU7的AEB(自动紧急制动)功能仅针对车辆、行人、二轮车三类目标,无法识别锥桶、水马、水泥墩等施工障碍物。事故案例中,系统虽检测到前方障碍物并发出预警,但未触发AEB制动,最终导致碰撞发生。 2. 纯视觉方案的硬件短板 标准版仅配备1颗激光雷达(高阶版为3颗)、2个前视摄像头及单毫米波雷达,感知能力有限。在高速场景(如116km/h)下,摄像头对静止障碍物的检测距离不足100米,且夜间或强光环境下易受反光干扰。 3. 算法对非标障碍物的处理缺陷 小米的BEV+OCC算法虽宣称能识别异形障碍物,但实际测试显示其对不规则形状(如锥桶倾斜摆放、水泥墩部分遮挡)的响应延迟可达1.5秒以上,无法满足高速场景下的安全需求。 …… 综上,小米智驾对锥桶、水泥墩的识别能力与车型版本强相关,标准版存在明显技术缺陷,而高阶版通过硬件升级和算法优化显著提升了安全性。
long
根据搜索结果,发生爆燃事故的小米SU7标准版无法有效识别高速公路施工改道场景,主要原因如下: 1. 纯视觉方案的局限性 事故车辆采用纯视觉方案(未配备激光雷达),对施工改道等复杂场景的识别能力较弱。系统对静止障碍物(如水泥护栏)的检测距离仅约100米,且准确性随距离下降。在夜间或施工路段,摄像头可能因光线、反光等因素导致误判或漏检。 2. 系统应对策略不足 尽管NOA系统在碰撞前2秒检测到障碍物并发出警示,但减速幅度有限(从116km/h降至97km/h),未达到安全阈值。行业专家指出,L2级辅助驾驶系统在复杂路况下仍需驾驶员主动接管,但2秒的反应窗口远超人类极限。 3. OTA更新的时间差 小米SU7虽在2024年12月通过OTA新增了施工区域识别功能(VLM视觉语言大模型),但事故发生在2025年3月,推测涉事车辆可能未及时升级或未搭载该功能。高配版(激光雷达方案)的施工避让能力更强,但标准版仅依赖纯视觉。 综上,此次事故暴露了纯视觉方案在极端场景下的技术短板,以及车企对复杂路况应对能力的不足
long 回复 毛毛 04-02 21:53
可能我和你不是同一个世界,打扰了,再见!
毛毛 回复 04-02 21:43
985硕士研究生
头发乱了
又见各种科普了!一,记住雨田君的原话,它们的无图高速智驾已普及各系车型!二,视觉摄像头可是用来检测路标告示的。三,当已进入水马路段,速度依旧是120-4的时速。请继续科普,继续拿出一天发八条微博,八个头条的激情来为死者再抱一次不平!