导 读
人形机器人的总体架构主要包括感知层、决策层和执行层,感知层主要通过各类型传感器实时感知机器人的状态和环境信息,将信息流传递给决策层后,经过大模型及算法等处理分析后得出决策方案,进而由执行层的执行机构完成对应的动作。
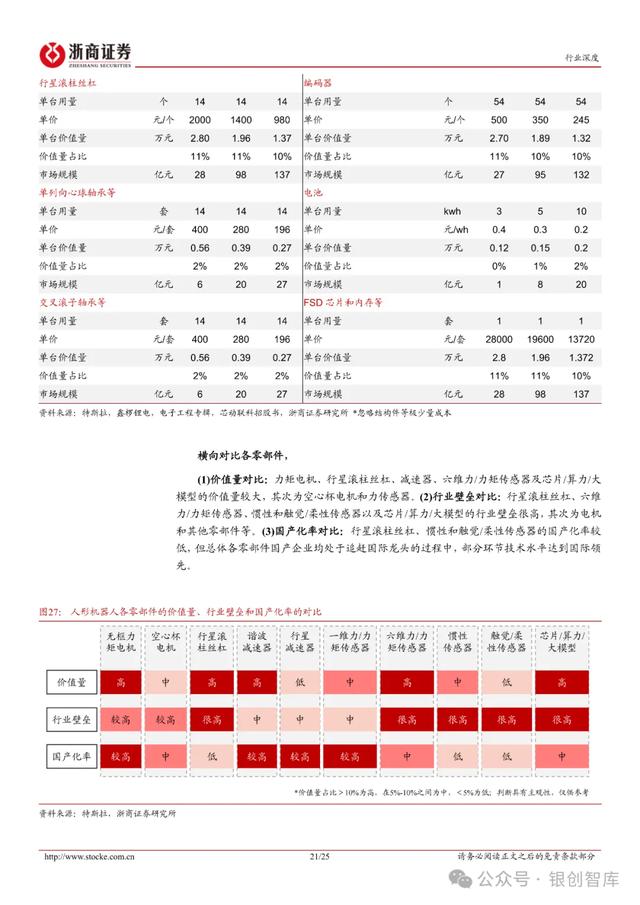
在硬件层面,特斯拉 Optimus 拥有 14 个线性执行器、14 个旋转执行器和两只灵巧手,其中线性执行器的配置为无框力矩电机+行星滚柱丝杠+力传感器+编码器+驱动器+球轴承+四点接触球轴承;旋转执行器的配置为无框力矩电机+谐波减速器+力矩传感器+双编码器+驱动器+交叉滚子轴承+角接触球轴承;灵巧手的配置为空心杯电机+行星减速器+编码器+驱动器+蜗轮蜗杆/绳驱+触觉等传感器。
全文(无删减)

















 精选报告来源:银创智库
精选报告来源:银创智库新能源/新材料/高端装备制造
储能丨锂电丨钠电丨动力电池丨燃料电池丨氢能源丨光伏丨风电丨新能源汽车丨电子元器件丨电机电控丨机器人丨工业自动化丨人工智能丨能源金属丨碳中和丨半导体丨集成电路丨芯片丨光刻丨先进封装丨碳化硅丨湿电子化学品丨新材料丨超导材料丨稀土永磁材料丨碳纤维丨高分子
