以下内容来自小六的机器人AI学习圈(6年积累,全国最大的机器人SLAM交流社区,为SLAM行业从业者提供从入门、学习、交流、求职、线下链接、合作、咨询、答疑等一系列的服务)知识星球每日更新内容
【Scene Action Maps: Behavioural Maps for Navigation without Metric Information】
文章链接:[2405.07948] Scene Action Maps: Behavioural Maps f...
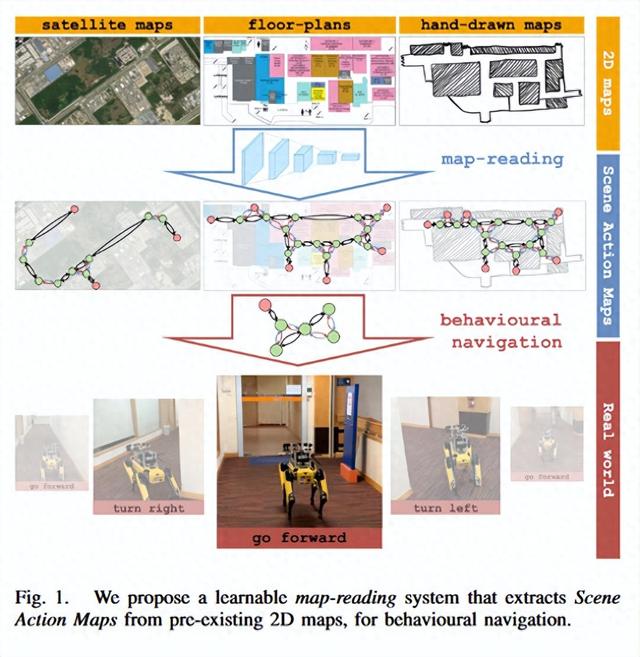
人类在没有度量信息的情况下进行导航的能力令人瞩目。我们可以阅读抽象的2D地图,如平面图或手绘草图,并使用它们在未知的丰富的3D环境中导航,而不需要事先遍历来详细地绘制出这些场景。我们认为,这是由于能够将环境抽象为相互关联的导航行为,例如"沿着走廊"或"向右转",同时避免了在度量级别上详细、准确的空间信息。我们引入行为拓扑图- -场景动作图( SAM ),并提出了一种可学习的地图读取方法,将各种2D地图解析为SAM。地图阅读从被忽略的大量预先存在的、抽象的和不准确的地图中提取有关导航行为的显著信息,包括平面图和草图。我们通过在四足机器人上建立和部署行为导航栈来评估SAMs的导航性能。