以下内容来自小六的机器人AI学习圈(6年积累,全国最大的机器人SLAM交流社区,为SLAM行业从业者提供从入门、学习、交流、求职、线下链接、合作、咨询、答疑等一系列的服务)知识星球每日更新内容
【VRS-NeRF: Visual Relocalization with Sparse Neural Radiance Field】
文章链接:[2404.09271] VRS-NeRF: Visual Relocalization with ...
仓库地址:GitHub - feixue94/vrs-nerf: Visual localization wi...
视觉重定位是自动驾驶、机器人、虚拟/增强现实等领域的关键技术。经过几十年的探索,绝对姿态回归( Absolute Pose Regression,APR )、场景坐标回归( Scene Coordinate Regression,SCR )和层次方法( Hierarchical Methods,HMs )已经成为最流行的框架。然而,APRs和SCRs虽然效率较高,但精度有限,尤其是在大规模室外场景中;HMs虽然准确,但需要存储大量的2D描述符用于匹配,导致效率较差。在本文中,我们提出了一种高效且精确的基于稀疏神经辐射场的视觉重定位框架VRS - NeRF。具体来说,我们引入了用于3D地图表示的显式几何地图( EGM )和用于稀疏块绘制的隐式学习地图( ILM )。
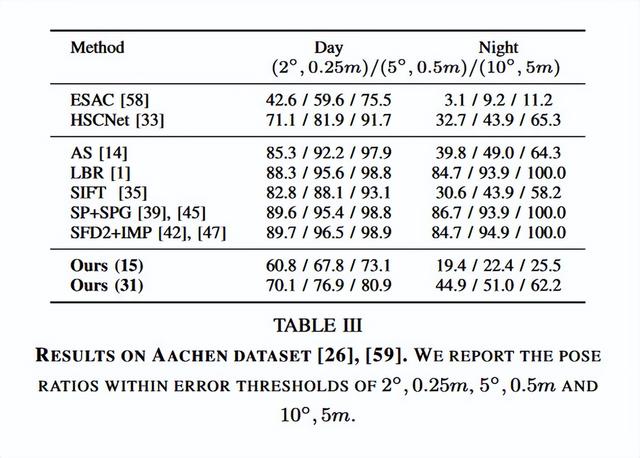
在这个定位过程中,EGP提供了稀疏2D点的先验,而ILM利用这些稀疏点来渲染具有稀疏NeRF的块进行匹配。这使得我们可以舍弃大量的2D描述符,从而减小地图尺寸。此外,只对有用的点而不是整个图像中的所有像素进行渲染,显著地减少了渲染时间。该框架继承了HMs的准确性,并摒弃了它们的低效率。在7Scenes、Cambridge Landmarks和Aachen数据集上的实验表明,我们的方法比APRs和SCRs有更高的准确率,性能接近HMs,但效率更高。







 推荐教程我对Fast-LIO2做了改进,解决了Z轴漂移、有效检测回环及解决了回环重影、实现了重定位2025秋招,上来就问3D Gaussian Splatting。。。香港大学开源的这个激光雷达惯性SLAM,太强了!一招掌握3DGS基础视觉三维重建!深度计算+点云处理+网格重建优化+纹理贴图!谷歌这个SLAM开源方案,造福了整个机器人行业!重大变革!NeRF和3D高斯喷溅如何重塑SLAM?发顶会顶刊不再难!多传感器融合SLAM、生成式AI、3DGS、NeRF、标定等方向这个开源框架,造福了无数卫星定位研究者和初创公司!BOSS:用了机器人仿真,立省几十万自动驾驶中的GNSS、RTK到底多重要?太强了!世界第一款开源的自动驾驶一体化框架Autoware!(附交流群)如何从零开始搭一套自己的SLAM系统?17讲全部上线!全网首个详解深度学习特征开源算法SuperPoint和SuperGlue(附交流群)最炸裂的机器人AI技术教程都在这了!
推荐教程我对Fast-LIO2做了改进,解决了Z轴漂移、有效检测回环及解决了回环重影、实现了重定位2025秋招,上来就问3D Gaussian Splatting。。。香港大学开源的这个激光雷达惯性SLAM,太强了!一招掌握3DGS基础视觉三维重建!深度计算+点云处理+网格重建优化+纹理贴图!谷歌这个SLAM开源方案,造福了整个机器人行业!重大变革!NeRF和3D高斯喷溅如何重塑SLAM?发顶会顶刊不再难!多传感器融合SLAM、生成式AI、3DGS、NeRF、标定等方向这个开源框架,造福了无数卫星定位研究者和初创公司!BOSS:用了机器人仿真,立省几十万自动驾驶中的GNSS、RTK到底多重要?太强了!世界第一款开源的自动驾驶一体化框架Autoware!(附交流群)如何从零开始搭一套自己的SLAM系统?17讲全部上线!全网首个详解深度学习特征开源算法SuperPoint和SuperGlue(附交流群)最炸裂的机器人AI技术教程都在这了! 