以下内容来自小六的机器人AI学习圈(6年积累,全国最大的机器人SLAM交流社区,为SLAM行业从业者提供从入门、学习、交流、求职、线下链接、合作、咨询、答疑等一系列的服务)知识星球每日更新内容
CVPR 2024 | 中科院联合清华大学等开源“FastMAC: 对应图的随机谱采样”
【FastMAC: Stochastic Spectral Sampling of Correspondence Graph】
文章链接:[2403.08770] FastMAC: Stochastic Spectral Sampling...
开源代码: GitHub - Forrest-110/FastMAC: Source code of CVPR ...
作者单位:中科院、清华大学、上海AI实验室。上交
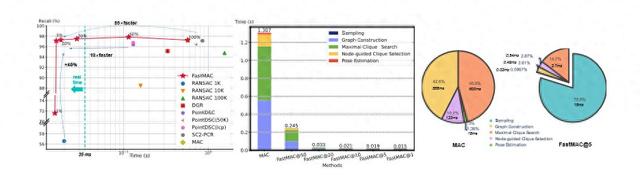
3D对应,即一对3D点,是计算机视觉中的一个基本概念。当一组3D对应具有相容边时,就形成了一个对应图。该图是几种最先进的三维点云配准方法,如基于最大团( MAC )的三维点云配准方法中的一个重要组成部分。然而,它的性质还没有得到很好的理解。因此,我们提出了第一个将图信号处理引入到对应图领域的研究。我们利用对应图上的广义度信号,并寻求保持该信号高频成分的采样策略。
为了解决确定性采样中奇异值分解耗时的问题,我们采用了随机近似采样策略。因此,我们方法的核心是对应图的随机谱采样。作为一个应用,我们构建了一个完整的三维配准算法FastMAC,在达到实时速度的同时,性能几乎没有下降。通过大量的实验,我们验证了FastMAC在室内和室外基准测试中的有效性。例如,FastMAC在保持较高的KITTI数据集配准成功率的情况下,可以将MAC加速80倍。#论文 #开源







以上内容来自小六的机器人AI学习圈(6年积累,全国最大的机器人SLAM交流社区,为SLAM行业从业者提供从入门、学习、交流、求职、线下链接、合作、咨询、答疑等一系列的服务)知识星球每日更新内容
推荐阅读
3D高斯泼溅 为什么能一直火?有哪些应用场景?香港大学开源的这个激光雷达惯性SLAM,太强了!一招掌握3DGS基础视觉三维重建!深度计算+点云处理+网格重建优化+纹理贴图!谷歌这个SLAM开源方案,造福了整个机器人行业!重大变革!NeRF和3D高斯喷溅如何重塑SLAM?发顶会顶刊不再难!多传感器融合SLAM、生成式AI、3DGS、NeRF、标定等方向这个开源框架,造福了无数卫星定位研究者和初创公司!BOSS:用了机器人仿真,立省几十万自动驾驶中的GNSS、RTK到底多重要?太强了!世界第一款开源的自动驾驶一体化框架Autoware!(附交流群)如何从零开始搭一套自己的SLAM系统?17讲全部上线!全网首个详解深度学习特征开源算法SuperPoint和SuperGlue(附交流群)最炸裂的机器人AI技术教程都在这了!