以下内容来自小六的机器人SLAM学习圈知识星球每日更新内容
#论文# arxiv2023 速递|利用自适应旋转校正改进GPS-VIO融合
【Improving GPS-VIO Fusion with Adaptive Rotational Calibration】
文章链接:http://arxiv.org/abs/2309.12005
作者单位:卢森堡大学Space Robotics (SpaceR) Research Group、航天技术先进中心(西班牙)、(TUD)代尔夫特理工大学
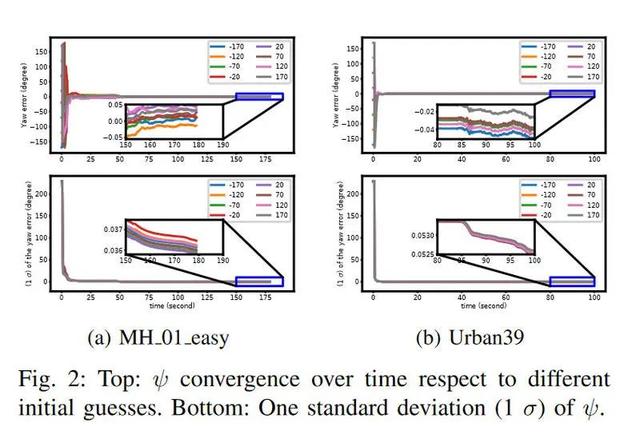
精确的全局定位对于自主导航和规划至关重要。为此,文献中提出了GPS辅助的视觉-惯性测程法( GPS-aided Visual- Inertial测程法,GPS-VIO )融合算法。本文提出了一种新型的GPS - VIO系统,该系统能够显著地受益于GPS参考框架和VIO参考框架之间的旋转外参在线自适应标定。其背后的原因是这个参数是可观测的。
本文通过非线性可观测性分析提供了新的证明。我们还在不同的平台上对所提出的算法进行了广泛的评估,包括飞行无人机和驾驶车辆。实验结果支持可观测性分析,并显示出与最先进的紧耦合算法( SOTA )相比提高的定位精度。



以上内容来自小六的机器人SLAM学习圈知识星球每日更新内容
推荐阅读
如何快速上手基于NeRF的SLAM?
太强了!世界第一款开源的自动驾驶一体化框架Autoware!(附交流群)
【全网首个】3D Gaussian Splatting原理、应用场景及最新进展
【全网首个】详解深度学习特征提取匹配开源算法SuperPoint和SuperGlue
