以下内容来自小六的机器人AI学习圈(6年积累,全国最大的机器人SLAM交流社区,为SLAM行业从业者提供从入门、学习、交流、求职、线下链接、合作、咨询、答疑等一系列的服务)知识星球每日更新内容
【Cross-Cluster Shifting for Efficient and Effective 3D Object Detection in Autonomous Driving】
文章链接:http://arxiv.org/abs/2403.06166
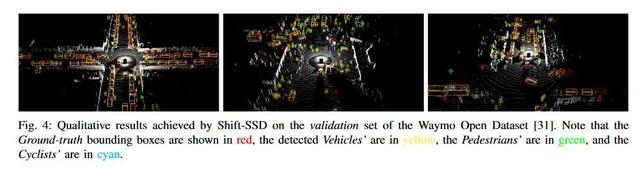
本文提出了一种新的基于点的3D检测器模型,命名为Shift - SSD,用于自动驾驶中的精确3D目标检测。传统的基于点的3D目标检测器通常采用依赖点的渐进下采样的架构。虽然该方法有效地降低了计算需求,增加了感受野,但对于精确的3D目标检测,特别是在复杂的驾驶场景中,它将损害关键的非局部信息的保存。为了解决这个问题,我们引入了一个有趣的Cross - Cluster Shifting操作来释放基于点的检测器的表达能力,通过高效地建模更长范围的相关性,同时只包含可忽略的开销。具体来说,Cross-Cluster Shifting操作通过将部分通道从相邻的簇中移除来增强传统设计,使其能够与非局部区域进行更丰富的交互,从而扩大簇的感受野。我们在KITTI、Waymo和nu Scenes数据集上进行了广泛的实验,结果证明了Shift - SSD在检测精度和运行效率方面的最新性能。







推荐阅读
3D高斯泼溅 为什么能一直火?有哪些应用场景?香港大学开源的这个激光雷达惯性SLAM,太强了!一招掌握3DGS基础视觉三维重建!深度计算+点云处理+网格重建优化+纹理贴图!谷歌这个SLAM开源方案,造福了整个机器人行业!重大变革!NeRF和3D高斯喷溅如何重塑SLAM?发顶会顶刊不再难!多传感器融合SLAM、生成式AI、3DGS、NeRF、标定等方向这个开源框架,造福了无数卫星定位研究者和初创公司!BOSS:用了机器人仿真,立省几十万自动驾驶中的GNSS、RTK到底多重要?太强了!世界第一款开源的自动驾驶一体化框架Autoware!(附交流群)如何从零开始搭一套自己的SLAM系统?17讲全部上线!全网首个详解深度学习特征开源算法SuperPoint和SuperGlue(附交流群)最炸裂的机器人AI技术教程都在这了!