以下内容来自小六的机器人AI学习圈(6年积累,全国最大的机器人SLAM交流社区,为SLAM行业从业者提供从入门、学习、交流、求职、线下链接、合作、咨询、答疑等一系列的服务)知识星球每日更新内容
【Robust Collaborative Perception without External Localization and Clock Devices】
文章链接:[2405.02965] Robust Collaborative Perception witho...
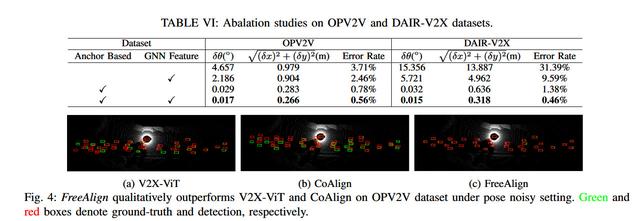
多智能体之间一致的时空协同是协同感知的基础,协同感知旨在通过智能体之间的信息交换来提高感知能力。为了实现这种时空对准,传统方法依赖于外部设备提供定位和时钟信号。然而,硬件产生的信号容易受到噪声和潜在的恶意攻击,从而影响时空对齐的精度。与依赖外部硬件相比,这项工作提出了一种新的方法:通过识别各种智能体感知数据中固有的几何模式来进行对齐。遵循这一精神,我们提出了一个独立于外部定位和时钟设备运行的鲁棒协同感知系统。我们系统的关键模块FreeAlign根据每个智能体的检测框为每个智能体构建一个显著性目标图,并使用图神经网络来识别智能体之间的公共子图,从而得到精确的相对位姿和时间。我们在真实数据集和模拟数据集上对Free Align进行了验证。结果表明,Free Align授权的鲁棒协同感知系统与依赖精确定位和时钟设备的系统性能相当。我们在真实数据集和模拟数据集上对Free Align进行了验证。结果表明,Free Align授权的鲁棒协同感知系统与依赖精确定位和时钟设备的系统性能相当。