
文|正经的烧杯
编辑|正经的烧杯
«——【·前言·】——»
激光跟踪仪测量系统是一种高精度测量仪器,具有测量范围大和精度高以及可移动等特点,广泛应用于工业机器人精度测试及在线检测领域。
然而激光跟踪仪测量过程中需要激光靶球的配合,由于靶球收光口仅有特定的角度,因此在远距离测试机动态测量过程中经常出现断光。

丢光后需要人工手动进行激光引导,这使得测量过程繁琐,严重影响了测量效率,难以满足工业机器人快速高效在线检测的要求。因此激光跟踪仪测量系统迫切需要实现跟踪仪与靶球的自主对光功能,以减少断光频率,提高测量效率。
现有的激光跟踪仪对光技术有激光跟踪仪对靶球自动定位方式以及激光靶球自主对光方式2类。某公司基于惯性检测原理提出了一种靶球定位系统,通过位姿检测与惯性导航定位靶球空间位置,再控制跟踪仪主动寻光以实现自动对光功能。
针对现有方法存在的不足,课题组提出一种基于惯性测量模块位姿检测与激光跟踪仪测量数据相结合的主动靶球装置,以STM32f103ZET6为核心设计了硬件电路,并完成了软件系统编程。
首先通过惯性测量模块实时监测靶球的位姿,并通过激光跟踪仪读取并记录靶球的位置信息,然后根据靶球的位姿与空间位置计算靶球收光口与跟踪仪之间的相对偏角,最后使用步进电机精准控制靶球进行旋转对光。
«——【·总体方案设计·】——»
当激光靶球相对于激光跟踪仪水平移动时,靶球收光口朝向与激光跟踪仪出射光方向会发生角度偏差θ,如图1所示。
当激光靶球在Pi位置时偏差角θi在收光范围1/2内,跟踪仪可以有效测量靶球位置。当激光靶球移动到Pi+1位置后,此时偏差角度θi+1大于靶球的接光范围的1/2,入射激光无法被靶球接收并反射,就会发生断光问题,导致测量点无效。为解决上述问题,课题组提出了一种能够使靶球在移动过程中实现自动对光的主动靶球装置。

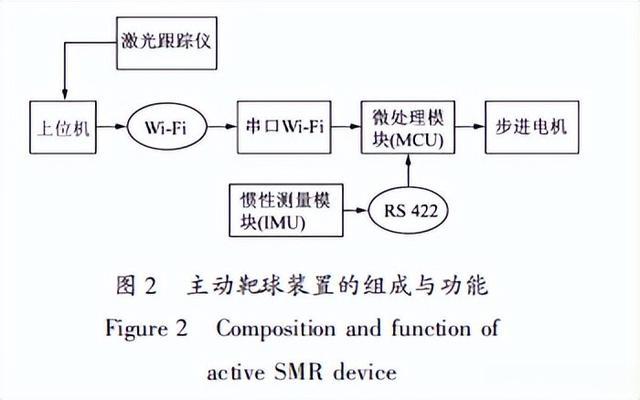
主动靶球的主要功能是在激光跟踪仪测量过程中控制激光靶球旋转对光,其系统组成如图2所示。上位机从激光跟踪仪中读取跟踪仪测头的水平角度,并通过Wi-Fi通信将角度数据发送给串口Wi-Fi模块,进而传递给处理模块(microcontrolunit,MCU)。
同时陀螺仪将靶球姿态通过RS422串口通信发送给MCU,MCU对惯性测量模块数据进行解码,读取靶球自身的偏航角。MCU根据2者角度计算靶球收光口与激光跟踪仪出射光之间的偏角,进而控制步进电机带动靶球旋转相应的角度,以实现对光。
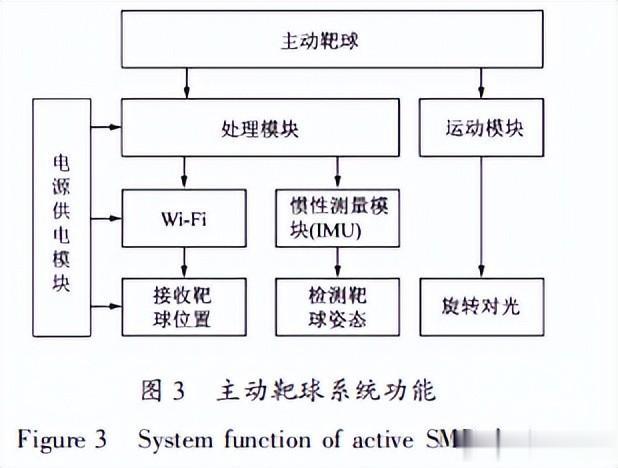
硬件方面,该主动靶球装置主要分为通信模块、IMU模块和运动模块。通信模块用于接收来自跟踪仪的靶球位置信息,IMU模块用于检测靶球姿态,运动模块用于直接控制靶球旋转,主动靶球的系统功能如图3所示。
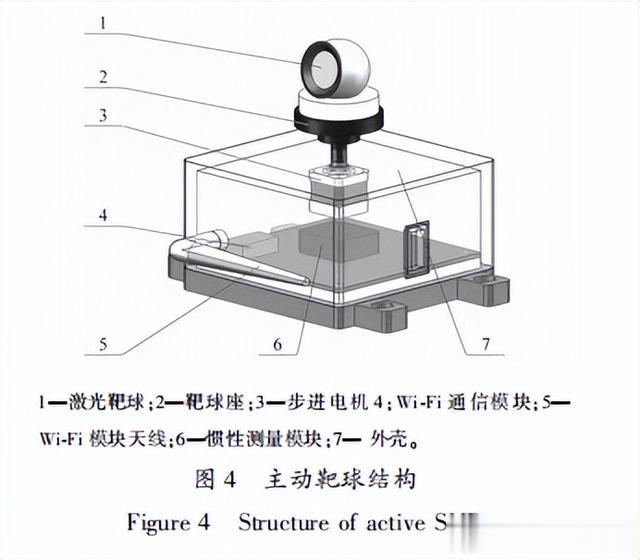
主动靶球结构如图4所示。激光靶球通过磁力吸附在磁性靶球座上,靶球座安装于步进电机转轴上由步进电机带动其旋转。主动靶球装置整体结构设计具有质量小和体积小的特点,可安装于各种复杂工件或机器人上,用于自动对光。
«——【·控制电路硬件设计·】——»
主动靶球控制电路主要由电源电路、主控芯片、Wi⁃Fi通信电路、IMU电路以及电机驱动电路组成。
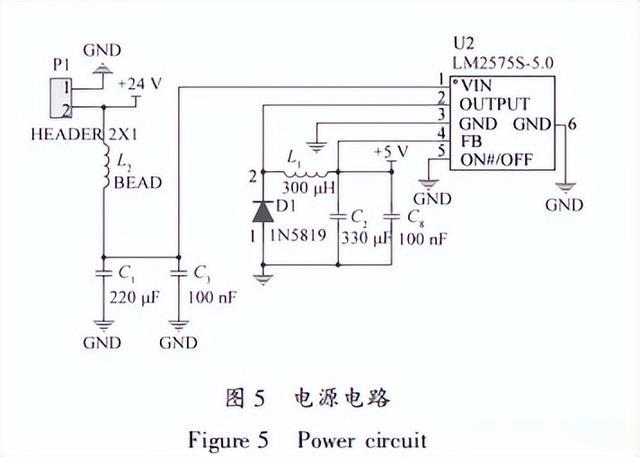
电源电路设计:主动靶球装置中步进电机需要5V电压驱动,主控芯片3.3V电压供电,主动靶球配备了1个24V输出直流电源。
因此电源电路需要实现24V转5V降压功能以及5V转3.3V降压功能。为满足电源需求,课题组选用LM2575S⁃5.0降压芯片将24V直流电源降压至5V给电机供电。
工作时降压芯片VIN引脚接入直流电源+24V,同时并联220μF和100nF电容进行滤波。

芯片OUTPUT引脚输出降压后的5V电压,在输出端并联330μF大电容用于滤除低频信号的干扰,同时并联多个100nF小电容用于滤除高频信号的干扰。获得5V电压后需进一步降压至3.3V用于主控芯片供电。电源电路设计如图5所示。
主控芯片电路设计:主控芯片是主动靶球的核心处理模块,用于接收和计算靶球角度并负责控制电机旋转。
电机控制要求控制芯片具备卓越的实时响应性(中断延时短)、纯处理功能(例如单周期乘法)以及优异的控制性能,为满足性能需求,课题组采用意法半导体公司(ST)的STM32系列微控制器作为主控芯片。
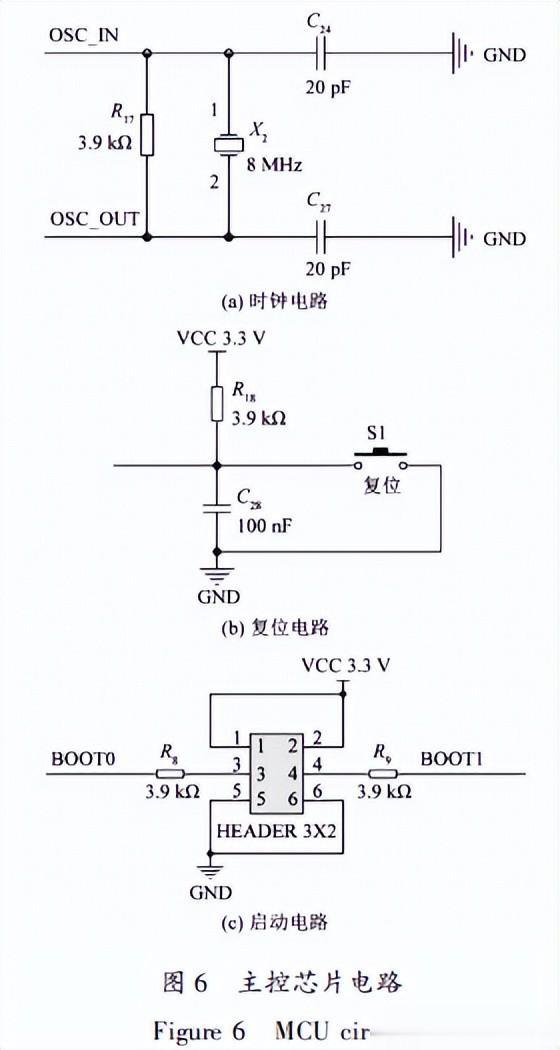
STM32系列微控制器以性能强大的Cortex⁃M3为内核,具有门数少、中断延迟小、调试容易等特点,能够完全满足所需要求。芯片电路主要由时钟电路、复位电路以及启动电路组成,如图6所示。
时钟电路:为了提供更为精准的时钟信号,单片机采用外置时钟电路,主要由晶振、电容、电阻构成。单片机内部振荡器在外部晶振、电容的作用下产生自激振荡,为单片机提供12MHz的正弦信号。
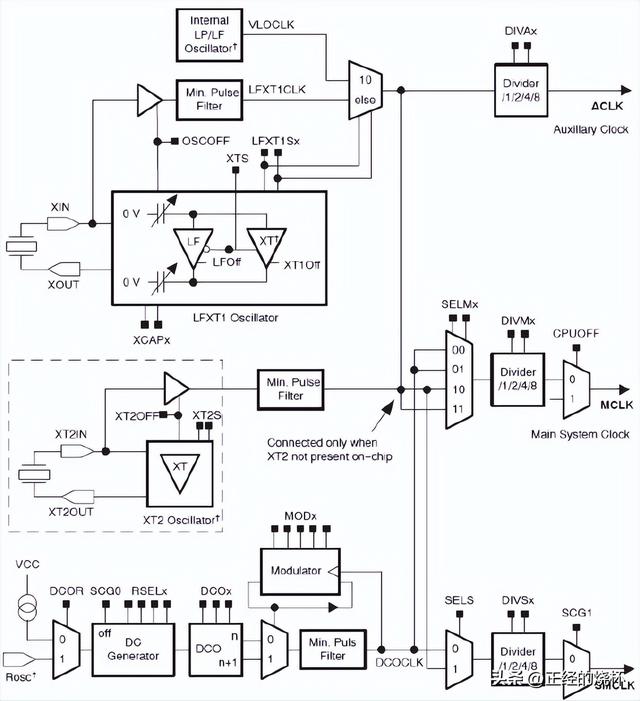
复位电路:复位电路的作用是在必要时使系统恢复到初始状态,STM32单片机的RST脚检测持续到20μs以上的高电平后,会对单片机进行复位操作。
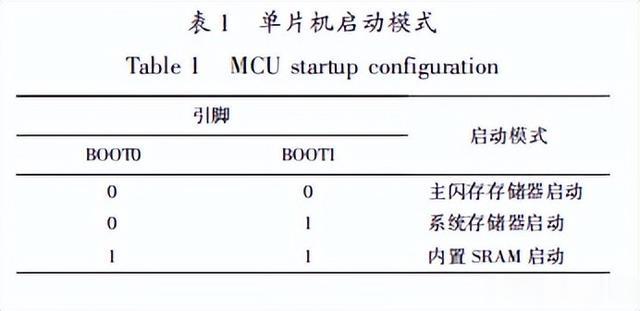
启动电路:启动电路中BOOT0与BOOT1引脚的接法决定了单片机不同的启动模式,如表1所示。课题组设计电路时使用跳冒,将BOOT0与BOOT1引脚分别接地,使用主闪存存储器启动模式。
Wi⁃Fi通信电路设计:在激光跟踪仪对机器人进行在线检测过程中,机器人往往需要沿复杂轨迹运动,此时在主动靶球上连接额外信号线会严重影响测量的安全性和准确性。
为保证通信的快速和稳定,课题组选用USR⁃WIFI232⁃B2模组作为Wi⁃Fi通信模块。其采用业内工业级高性能嵌入式结构,在智能家居、智能电网、手持设备、医疗及工业控制等领域有广泛应用。
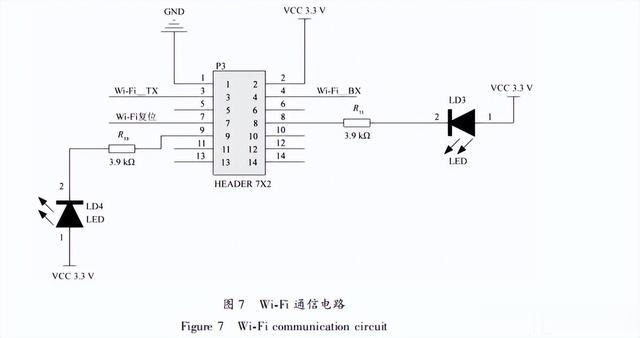
Wi⁃Fi通信电路设计如图7所示,工作时引脚1、引脚2接3.3V电源,引脚3、引脚4连接单片机的串口收发引脚,引脚7用于使Wi⁃Fi模块复位,引脚8、引脚9连接LED灯用于指示通信状态。
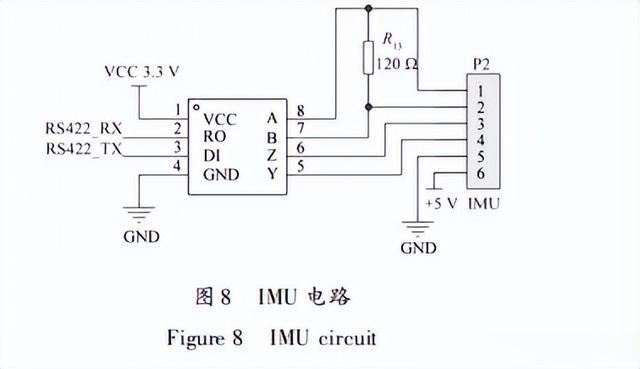
课题组采用MAX3488芯片实现通信功能,RO和DI引脚连接单片机的串口收、发引脚,A,B,Z和Y引脚分别连接IMU的数据收发引脚,IMU电路设计如图8所示。
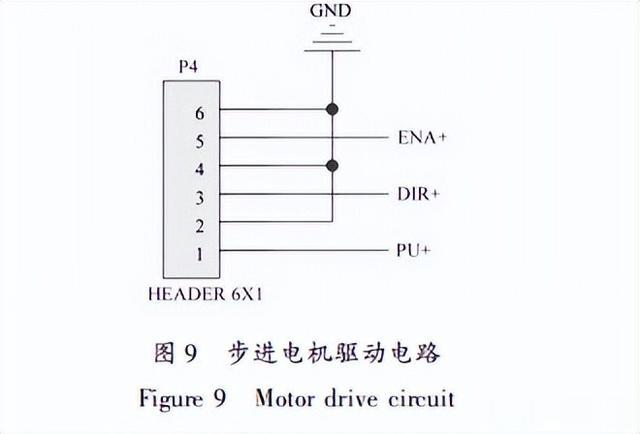
电机驱动电路设计:考虑到靶球对光需要较高的位置精度和运动重复性,课题组选用42系列步进电机作为主动靶球运动模块,通过驱动器信号输入端输入的脉冲数量和频率实现激光靶球的角度和速度控制。
步进电机驱动电路设计如图9所示,引脚1、引脚2连接电机脉冲输入端口,引脚3控制电机运动方向,引脚5控制电机使能。
«——【·软件设计·】——»
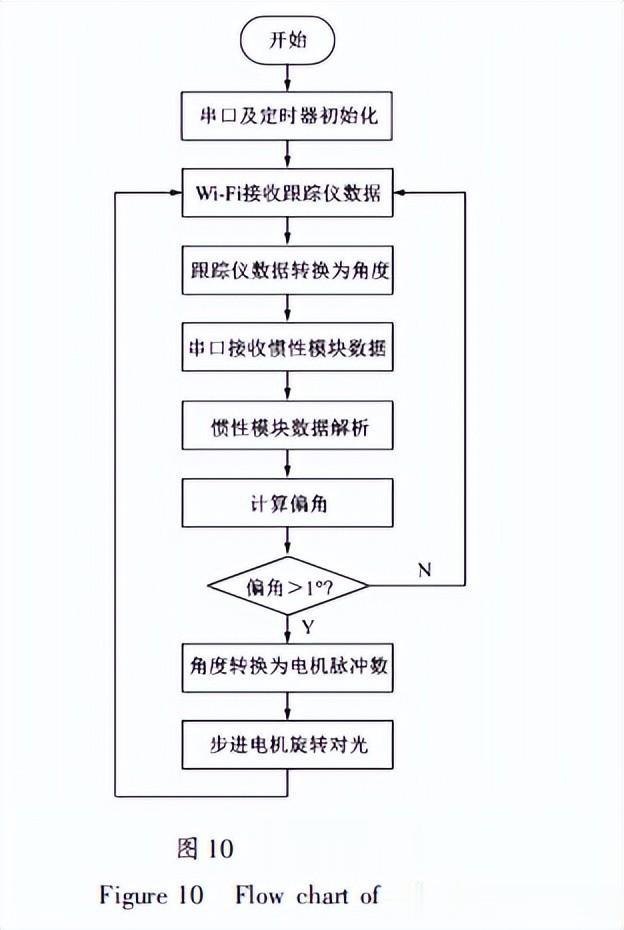
在完成硬件电路后,需要通过编程实现单片机对不同模块的控制功能。课题组选用C语言编写单片机控制程序。程序主函数主要包含跟踪仪角度接收、惯性测量模块角度解析以及步进电机运转驱动3个部分,软件流程如图10所示。
计算偏角:主动靶球工作时,通过相邻2个时刻的跟踪仪角度和靶球自身转角,融合跟踪仪与惯性测量模块测量值,计算出靶球偏角,从而控制电机反向旋转对应偏角以实现对光。
靶球偏角计算原理如下:靶球装置通过Wi⁃Fi模块从上位机获取激光跟踪仪测得的靶球当前空间位置与激光跟踪仪之间的水平偏角γi,同时从靶球座下方的惯性测量模块读取靶球自身当前水平转角δi。
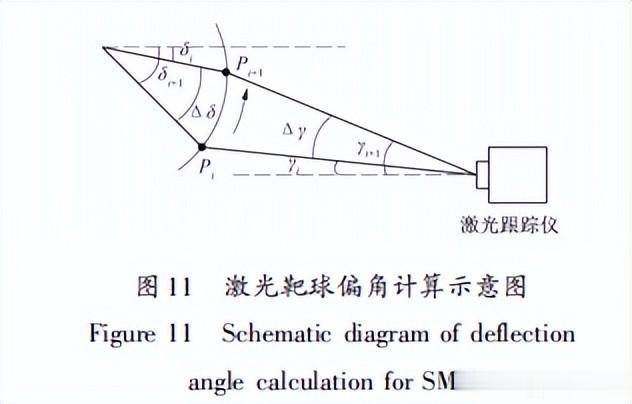
接着主动靶球接收并读取下一时刻的水平偏角γi+1及下一时刻的自身水平转角δi+1。相邻2个时刻的靶球与跟踪仪之间偏角和靶球自身水平转角如图11所示,计算靶球收光口朝向与跟踪仪激光之间的偏差角θ。
式中:Δγ表示跟踪仪测头在相邻2个时刻内的转角,Δδ表示激光靶球自身在相邻2个时刻内的转角。
电机驱动:课题组采用单片机通用定时器TIM3产生PWM脉冲输出的方式驱动步进电机,定时器占空比设置为50%,步进电机的步距角为1.8°。首先单片机计算出靶球偏角,计算所需脉冲数p为:

然后使能定时器产生脉冲方波,驱动电机旋转。在定时器中断函数中编写计数函数,用于计数脉冲数,当脉冲数达到设定值后表示靶球已经到达了入射激光位置,此时关闭定时器使电机停止运行。
«——【·测试结果·】——»
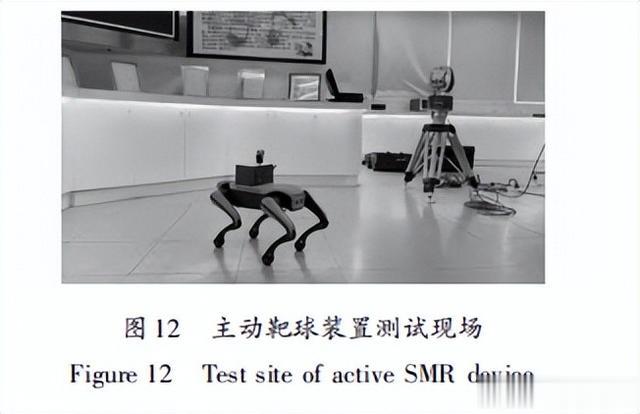
课题组将所设计的主动靶球装置分别安装在4足机器人上测试不同工况下靶球的对光性能,如图12所示。4足机器人由无线控制,可在场地内任意行走,以模拟实际测量工作中的典型轨迹。
首先将主动靶球装置的旋转轴垂直安装于4足机器人上方,初始状态由人工引光实现对光,然后控制4足机器人分别沿水平直线与弧线轨迹相对于跟踪仪移动,记录靶球移动过程中的断光次数,并与未使用主动靶球装置的测量工况进行对比,靶球断光次数如表2所示。
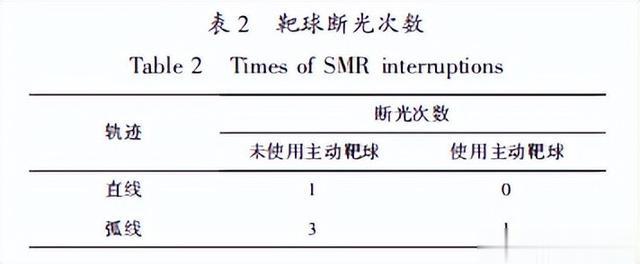
测试结果表明:主动靶球装置在移动过程中具有良好的自动对光性能,能够有效减少测量过程中靶球断光次数,减少了跟踪仪使用过程中人工引光的操作,提高了测量效率。
«——【·结语·】——»
课题组设计并实现了一种应用于激光跟踪仪的主动靶球装置,基于STM32系列芯片实现了控制电路设计,并使用C语言编写了控制程序,实现了靶球自动对光功能。
将检测跟踪仪的角度测量值和靶球自身的旋转角度进行融合,准确地计算出了工作过程中靶球收光口与跟踪仪入射激光之间的偏角。该设计大大拓展了靶球对光范围,显著提高了测量效率,相较于现有的靶球对光方法,具有良好的实用性。
通过4足机器人对主动靶球装置的对光性能进行测试,结果表明:使用该主动靶球装置可以有效减少跟踪仪动态测量时的断光次数,但仍无法完全避免断光现象。
未来将进一步优化控制程序以提高装置的稳定性和精确性。此外还将探索增加主动靶球装置的对光维度,由一维旋转对光增加至二维旋转,进一步提高测量效率,为跟踪仪动态测量提供一种更加准确高效的对光方法。
