
文|正经的烧杯
编辑|正经的烧杯
«——【·前言·】——»
国家对河湖管理的全面加强、水资源开发利用以及防旱减灾工作的必要需求,奠定了陆地与水下地形测量的重要意义,建立高精度的水上水下地形一体化测绘模型对于水利工程建设规划与施工过程的质量控制影响重大。
复杂地形环境下的测量工作受多方面因素影响,仅凭借传统测量仪器无法高时效满足大规模水上水下地形的测量需要,基于此,机载LiDAR、单波束、多波束测深技术作为新兴测量方式脱颖而出。

某公司为向某水利研究机构提供河道DEM及三维模型数据支持,采用机载LiDAR点云数据生成陆域DEM,利用无验潮RTK单波束测深数据生成DDM,并将DEM与DDM进行一体化拼接,生成水上水下一体化DEM及三维地形模型。
其中水上部分通过无人机搭载激光雷达系统,实现高精度的三维点云数据采集,并在此基础上建立三维模型,实现无接触式水上地形的高精度测量。
其高精度、高效率的作业方式,以及受天气影响较小的特性,已成为目前主流的水上地形获取方式,并联合倾斜摄影测量技术被广泛应用到地形图测绘工作中。
水下地形勘测相对陆地而言,研究范围、深度及工程应用方面尚不全面,水深作为水下地形测量的主要内容,目前可通过测深杆、测深锤、单波束及多波束等方式实现。
其中单波束、多波束可搭载在无人船上实现高精度的数据采集。两者各有优势,多波束所采集的点云数据集更为丰富、精度更高、效率更佳,但并不适用于浅水域,且价格较为昂贵,而单波束更适合浅水作业。
以本次所涉及的某试验河道区域为例,兼顾项目经济成本、效率以及最终的成果质量,选择单波束测深仪进行水下点云数据的获取,而后利用测深杆获取检查点数据,以验证单波束测深方式所获取数据的有效性与准确度。
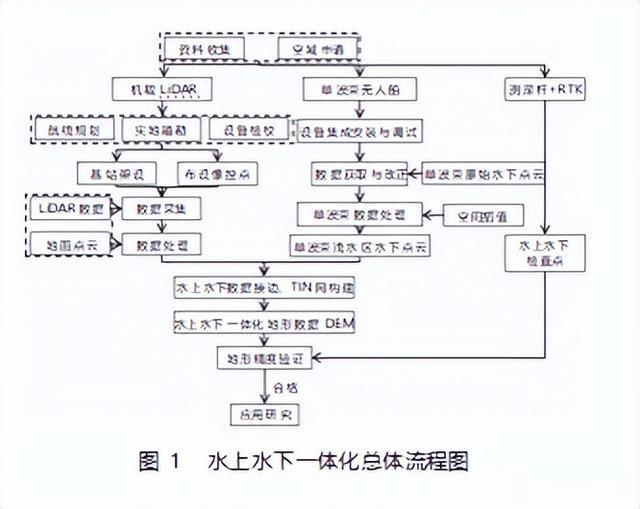
通过水下单波束数据、机载LiDAR点云数据的采集与处理,实现水上水下点云数据的无缝接边与不规则三角网(TIN)的构建,从而实现水上水下数据的一体化融合,最终实现水上水下数字高程模型(DEM)的建立,技术流程如图1所示。
通过TerraSolid软件进行水上激光点云数据处理,包括点云去噪、滤波、地面点提取及人机交互操作等步骤,获取建立数字高程模型所需的地面点云。
水下单波束测深技术经改正处理后得到水下点云数据,通过选用合适的空间插值方式(本次使用克里金法)实现水下地形拟合。
而后与水上点云一体化融合后实现试验区范围内整体TIN网的构建及DEM的建立,并基于随机均匀分布的检核点进行水上水下一体化地形的精度验证。
«——【·机载LiDAR航摄数据处理·】——»
三维激光扫描技术测量原理:激光雷达是一种主动式发射红外及可见光波段的激光束,根据其发射与接收所产生的时间差实现精准测距。
其中机载LiDAR以无人机作为载体,高度集成了激光测距技术、惯性导航技术以及GPS动态差分技术等,可快速获取一系列地表点的精确空间坐标,通过后处理等转换即可得到以“点云”形式表现的地表模型。
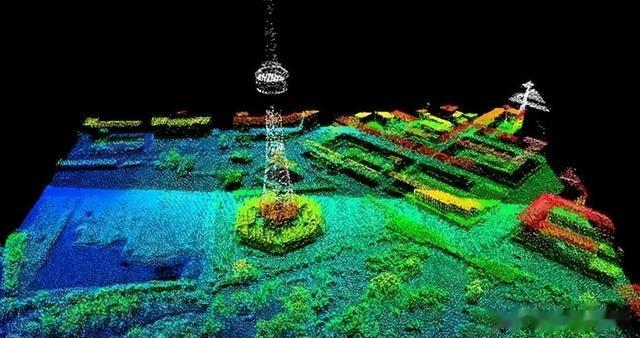
图2为机载LiDAR的作业流程,数据采集后通过点云解算得到三维激光点云数据,而后对其进行数据后处理,通过点云抽稀达到数据量适当减少、处理效率显著提高的目的,同时利用点云去噪、滤波等方式去除噪点及无关点的干扰,最终得到DEM构建所需的地面点数据。
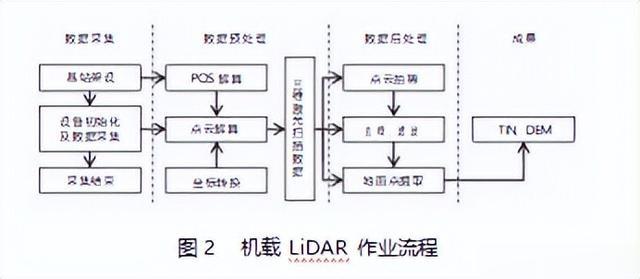
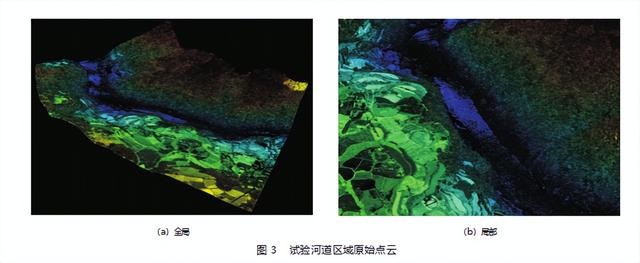
图3为本次试验选取河道范围内的原始点云数据,包含地面低点、孤立点、悬点等噪声数据,植被、人工地物等无关点及地面点有效数据等。
点云去噪:通过三维激光扫描技术获取到的海量点云,包含了因多种因素所产生的噪点数据,它们会对地形构建产生较大影响,使地形失真,因此点云数据后处理过程必须考虑噪点去除。
本次试验基于TerraSolid的TerraScan模块实现在地表连续分布的情况下,当点云分布较为均匀时,如果单个点或局部点群与周围一定范围内的点群高程差超过设定的阈值,即为噪点,如果以待判断点为中心,在一定的搜索范围内的点的数量低于所设定的阈值,则为噪点。
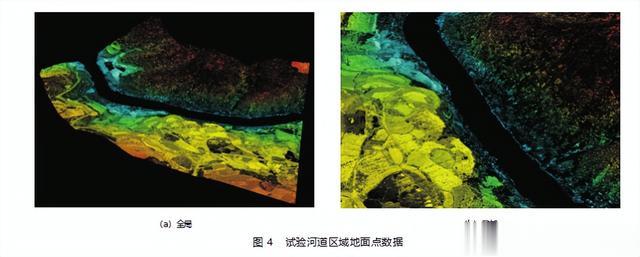
点云滤波:激光雷达原始点云中除了噪声点外,还包括植被、人工构筑物等无关点,通过TerraScan模块所提供的三角网迭代加密滤波算法完成滤波分类。
完成滤波处理后,若还有非地面点数据的存在,可通过人机交互处理的方式继续进行点云降噪,最终获取到可利用的地面点云数据,如图4所示。
«——【·船载单波束测深数据处理·】——»
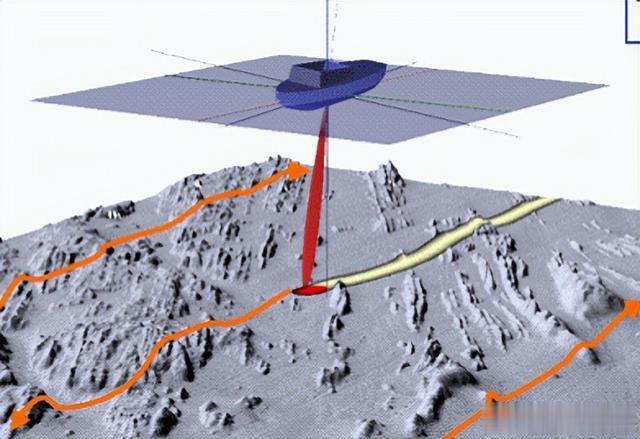
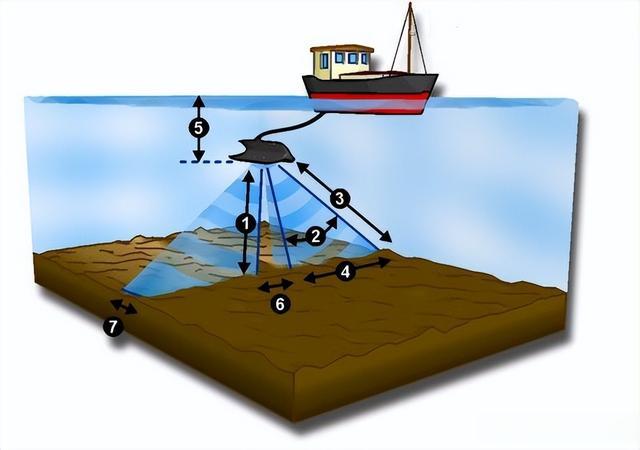
单波束水下测深原理单波束测深技术由换能器(安装在船底)向水下垂直发射声波,水深数据可通过声波在水中的传播时间与传播速度计算得出。
单波束进行一次测量只能得到一个水深点,随着无人船的推进行驶,逐步实现由点呈线、由线构面的测量成果。

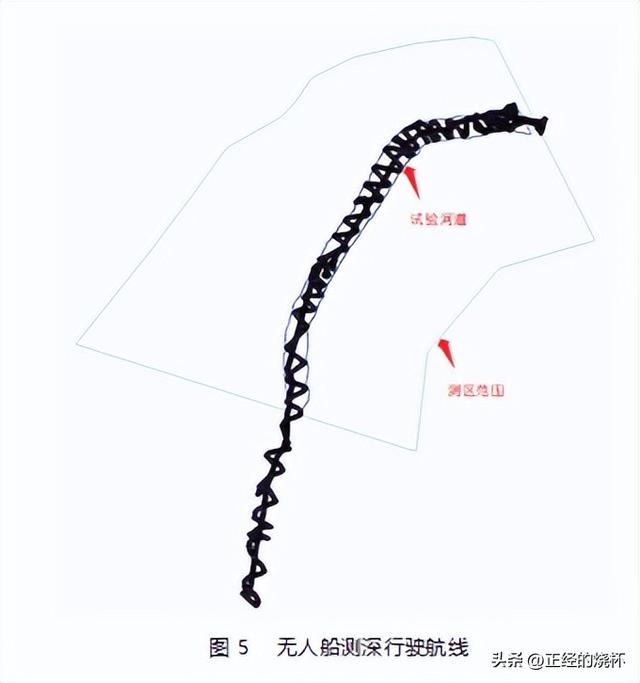
测线的布设应兼顾水下地形地貌特征、水深等因素,主测线宜垂直于等深线走向进行布设,图5为本次试验河道测区内水下单波束测深的航线布设。
式(1)为单波束测量方式的水深计算公式:

式中D为水深,即换能器到水底的距离,t1为换能器发射脉冲信号的时间,t2为换能器接收脉冲信号的时间,C为超声波在水中的传播速度。
«——【·单波束数据空间插值预处理·】——»
利用单波束测深技术进行水深测量,由于单波束测深作业模式为逐点测量,因此在无人船行驶航迹处的数据较为密集,而相邻测线之间则会出现数据空白的情况。
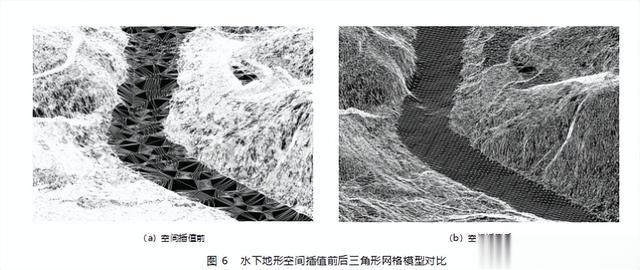
若直接使用测得的单波束测深数据进行不规则三角网的构建,水下地形的分辨率极低,如图6(a)所示,考虑到测区水下测深数据分布不均匀的问题,本次采用数据格网内插方式实现测线间数据空白区域地形变化的拟合分析,使水下地形更贴合实际。
水下地形数据的空间插值主要方法为样条函数法、反距离权重法、自然邻域法以及克里金法。
样条函数法以曲面总曲率最小为准则,通过已有的样本信息建立数学函数,来预测未知点的数值,适用于地形起伏不大的区域拟合,对于高度变化较为剧烈的区域无法拟合得十分平滑。
反距离权重法通过假设未知点,将所有的数据进行加权平均,所得到的测量值往往围绕着中间测量值。
该法的权重设置仅与距离有关,忽略了数据点的空间相关性,对于诸如河道的地形拟合,极易造成不合适的插值结果。
自然邻域法本质上为有限区域内的局部插值,通过获取数据点与该点附近区域的增量样本子集,根据面积大小确认权重实现插值。
该算法无法很好地拟合地形变化趋势,且受区域限制影响较大,克里金法以空间统计作为第一要领,不认为空间变化可以通过规律的数学函数实现完美表达。
它提出了“随机曲面”这一概念,以一定的区域变量实现随机曲面的模拟生成,更好地展现了空间变化的特性。
该方法以变异函数空间分析为基础,以区域化变量为核心研究内容,对变量的连续性、相关性等进行描述,能更好地解决地形连续性不规则的插值问题。
基于其高度适应性,本文使用了克里金法进行水下单波束数据的空间插值实现,较空间插值前的地形点数据对比,地形分辨率显著提高,更加贴合河道实际地形,表面空间插值后的三角形网络模型见图6(b)。
«——【·水上水下一体化数据融合实现·】——»
水上水下数据融合:激光雷达点云数据经后处理提取到地面点、单波束测深数据经空间插值提高地表分辨率后,基于相同的数据时空基准实现多元点云数据的融合处理。
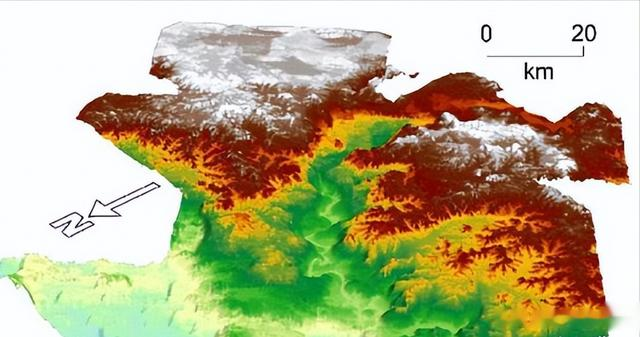
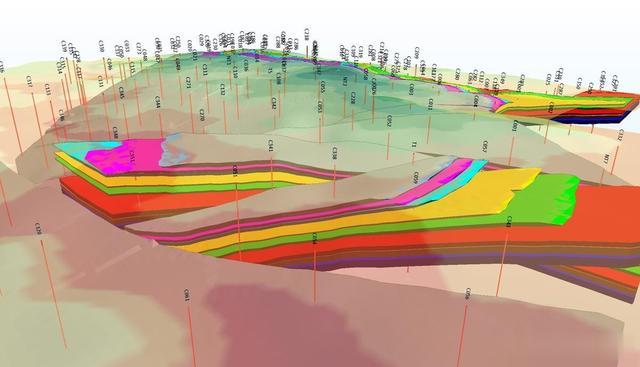
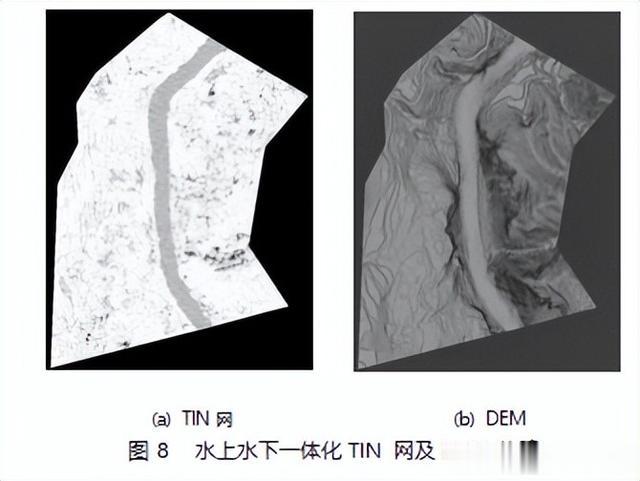
在两部分点云数据覆盖测区完整、无空洞、无遮挡的情况下,利用GEOPAK实现水上水下一体化TIN网的建立,而后实现水上水下一体化数字高程模型的创建。
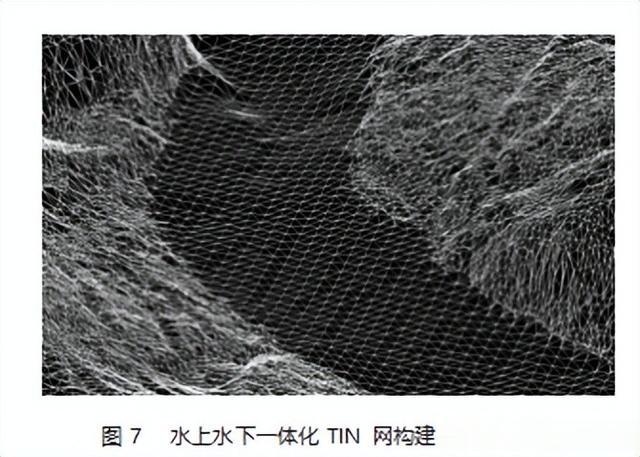
基于此后续利用测深杆+RTK测量方式所得的检核点对所得DEM进行精度验证,水上水下一体化TIN网及DEM构建如图7~8所示。
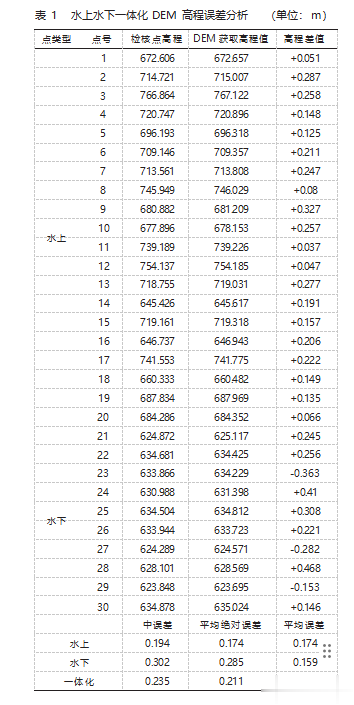
精度评价:对水上水下地形DEM的精度进行评价主要通过高程误差分析实现,其中三个高程误差分析指标可用来精准实现DEM质量评价。
中误差DEM高程误差偏移量的具体评价,一定程度上能体现出数据的离散情况,如式(2)所示。

式中σ为中误差,Zk为检核点高程值,Rk为DEM提取高程值,n为参与检核的检查点个数。
平均绝对误差,它是关于DEM提取高程值与检核点实际值之间偏差所对应的绝对值之间的一种算术平均,如式(3)所示。

式中MAE为平均绝对误差,Zk为检核点高程值,Rk为DEM提取高程值,n为参与检核的检查点个数。
平均误差它是关于DEM提取高程值与检核点实际值之间差值的一种平均,如式(4)所示。

式中MRE为平均误差,Zk为检核点高程值,Rk为DEM提取高程值,n为参与检核的检查点个数。
采集30个均匀分布于测区范围内的GPS检核点的数据用于DEM的误差分析,其中20个水上检查点用于对LiDAR点云所生成的水上DEM进行评价,10个水下检查点数据对单波束测深数据插值拟合后的DEM数据进行精度验证。
基于中误差、平均绝对误差、平均误差三个指标分别进行了水上部分、水下部分以及水上水下一体化DEM的精度指标计算,结果见表1。
«——【·结语·】——»
本文基于机载LiDAR与无人船搭载单波束测深技术实现了水上水下地形一体化模型的构建,并进行了精度评价。
机载LiDAR水上地面点云数据提取、船载多波束测深技术水下地形点数据的获取,与传统的测量作业模式相比,两种不同的作业形式均不同程度地提高了内外生产作业效率,减少了人力输出,更大程度地保证了作业人员的安全。
通过机载LiDAR水上地面点云数据提取、船载多波束测深技术水下地形点数据的获取,实现了水上水下地形一体化融合,其中水下地形点数据的插值拟合效果远优于不进行空间插值的水下地形效果。
一体化后的水上水下地形成果的高程误差远优于相关规范要求中1:2000的精度要求,可应用到洪水淹没模拟分析等实际工程应用中。
