
文|正经的烧杯
编辑|正经的烧杯
«——【·前言·】——»
为适应城市及城市群间协同快速发展,减少市中心与郊区、城市间的通勤时间,建设交通强国需求,城际铁路一般采用动车组,运行速度为160~200km/h,以适用站间距更大的需求,为实现公交化运营,城际铁路一般要求设置站台门。
而地铁是一种城市轨道交通系统,运行速度一般不超过120km/h,站间距短,主要用于城市内部交通运输,连接城市中心及周边。相比地铁城际铁路拥有更大的站厅、站台区域、更快的区间速度和更高的安全运行要求。

为了减少列车运行产生的风压对站台门的影响以及适应不同车型(列车门位置设计可能不同)停靠站台的需求,方便乘客上下车,城际正线站台门与列车间隙(1.3m)远大于地铁站台门与列车间隙(13cm)。
另外由于城际站台具有更大的站厅,例如广东省珠三角城际地下站台每侧有23根1.2m×0.8m结构立柱,常作为站台门一部分,设置在站台门内、外侧,如图1所示。

因此相对于地铁城际站台门与列车间的风险空间具有超长、超大、视线死角多和环境超复杂等特点,更容易出现拥挤、摔倒、遗留物品及人和乘客越过安全区等影响列车运营的安全事件,对城际铁路的安全和运营效率影响极大。
同时因结构立柱影响视线,站务人员无法透过站台门玻璃辨识站台门内的状态,需要借助自动检测手段发现异常情况。

站台门与列车门的通道是连接站台与列车的唯一通道,是城际运输系统的风险点、瓶颈点和管控核心区域,直接影响列车在站时间、运输效率、安全和乘客服务水平。
然而现有异常监测手段存在着漏检率高、误报率大,实时性差等缺点,这额外增加列车在站时间,严重降低列车的运行效率,无法满足城际铁路运营的发展需求。

目前国内外针对城际高铁站台门与列车间距的研究极少。因此在分析城际轨道站台超长连续空间的风险特性及顶装式安装方式下视觉检测方法优势的基础上,对站台门与列车间风险空间现有安全监测技术进行归纳。
针对城际轨道站台超长连续空间内急需解决的异常事件,提出风险空间异常检测系统的技术要求。为城际轨道站台超长连续空间异常检测系统的研发与应用提供参考。

«——【·城际铁路站台风险空间感知信息评估·】——»
乘客上下车安全和行车安全都是运营中的核心问题。为确保列车能够在规定条件下安全通过站台区域,列车与站台门之间需要保留一定间隙。
对于运营单一车型、车门与站台门对应良好的情况,应该考虑列车与屏蔽门之间的安全余量,并将屏蔽门(站台门)设置在距离站台边缘0.1m处。如果运营多种车型,车门与站台门无法一一对应,则还应考虑旅客在站台门与列车之间行走的空间。

通过对国内部分城际铁路正线站台门设置情况的分析可知,当列车通过站台速度为200~250km/h时,屏蔽门至站台边缘的距离通常介于1~2m之间。
表1给出国内部分城际铁路屏蔽门设置情况。以广州某城际铁路站台为例,其站台长度最长为210m(8编组)。

正线站站台门与站台门边缘宽度为1.2m,到发站站台门与站台边缘宽度为0.2m。在沿站台纵向方向的每810m处设置宽0.8m、长1.1m的水泥立柱,设置在站台门和站台边缘之间的1.2m空间内。风险空间(检测区域)由列车、站台门、超长站台组成的三维空间。
目前,国内外全自动驾驶线路的列车门与屏蔽门间安全信息感知技术有红外光幕、激光光幕、激光扫描仪和基于机器视觉的检测方法。
不同方法的检测范围如图2所示,如图2-(1)所示,激光/红外光幕通常采用侧装的方式。在城际铁路站台门和屏蔽门之间设置1组红外线发射器和接收器,形成1个红外光幕,

当有人或异物进入光幕时,会阻挡红外线的传输,从而产生信号,通知控制中心。激光/红外光幕技术只能检测到通过光幕的异物,无法检测到在光幕周围的异物,检测范围有限,不适合城际站台与列车间之间距离为1.2m的情况。
在强光等恶劣环境下,容易出现误报或漏报的情况,基于激光扫描[7]的技术遵循TOF飞行时间测距的基本原理,通过激光器发出激光光束,利用激光传感器对车站门区域进行扫描,并对扫描结果进行处理分析,从而实现对异物的快速检测。

当有异物进入检测区域时,激光束在物体表面产生反射和散射,通过检测反射和散射的光强差异来判断异物的位置和大小。当异物超过预设大小和位置时,会触发报警系统,提醒相关人员进行处理。
«——【·城际铁路风险空间异常物体检测·】——»
风险事件包括站台门与列车之间、站台边缘、防踏空胶条上的人或物。还包括站台门和列车车门门缝夹异物事件。机器视觉算法利用摄像头和计算机来代替人眼做测量和判断,是当前目标检测领域的一个研究热点。

如车站广场的遗留物检测,列车行驶轨道间的异物检测,机场跑道异物检测等。改进CNN算法来检测地铁风险空间中的异物,证明基于深度学习的目标检测算法在该任务中的潜力。
由于不同类型异物危害等级有所区别,工作人员的应对措施具有很大差异,例如,小型、柔软异物对列车运行的安全威胁小,风险等级低,通常不会延误列车的正常发车。而大目标,如夹人事件则对应最高的危险等级,需立即停车并实施应急方案。

目前城际铁路异常检测面临着异常数据匮乏、数据种类不平衡、异常类型随机、目标尺寸小等问题。根据数据标签的可用性,异常检测方法可分为监督、半监督和无监督学习模型。
如图3所示,基于图像修复的异常融合网络主要包含3个部分:图像修复自动编码器,局部异常信息增强,全局语义重建误差。图像修复编码器包含1个编码器以及1个解码器,其仅使用正常样本进行网络训练。

由于图像修复以及拼接实现重建图像中异物信息的完全抹除,因此完全可以利用原始图像与重建图像的像素差图来检测异物,而考虑到重建图像单位为补丁,选择突出重建补丁之间的差异作为检测异物是否存在以及定位的依据之一。
«——【·城际铁路乘客异常行为检测·】——»
针对城际铁路站台上乘客的异常行为识别问题,提出一种基于骨架的识别框架,如图5所示,框架主要包括2个部分,第一部分通过姿态估计网络获得个人的骨架数据;第二部分通过图卷积神经网络对骨架数据进行分类。
对于姿态估计任务,使用HRnet算法来获得骨架数据,HRNet通过并行连接高分辨率到低分辨率卷积来保持高分辨率表示,并通过重复跨并行卷积执行多尺度融合来增强高分辨率。

在第二部分,使用一种高效的多流网络,这种结构不仅能实现丰富的信息表示,同时在计算上也更加高效。
«——【·根据城际铁路·】——»
运营公司的建议和乘客安全规定,我们建立异常动作识别数据集,对步行、蹲下、弯腰、摔倒4项活动进行数据收集。数据集规模如表4所示。

通过应用人体姿态估计算法(HR-net)来获得骨架数据。使用线性插值来扩展较短的序列,并使用随机采样来减少较长的序列,将骨架序列归一化为均匀长度。为了确保稳健的结果,使用五重交叉验证对网络进行训练(80%)和测试(20%)。
网络训练采用3个NvidiaRTX-2080Ti图形处理器进行。在训练过程中,输入图像的大小将被统一调整到256×256,网络的batchsize为16,训练epoch为2000。实验对比结果如表5所示

由表5可知,在行走这一类别上分类精度低于其他方法。这是由于行走在时序上分类特征不是明显,而在时间卷积上的层数较少导致的。
在模型参数量和计算开销方面,比网络模型的基础版本EfficientGCNV1增加了略微的计算开销,这是由于采用参数量更大的自适应图卷积模块来获得更强的性能。部分检测结果样例见图7。

«——【·越界检测·】——»
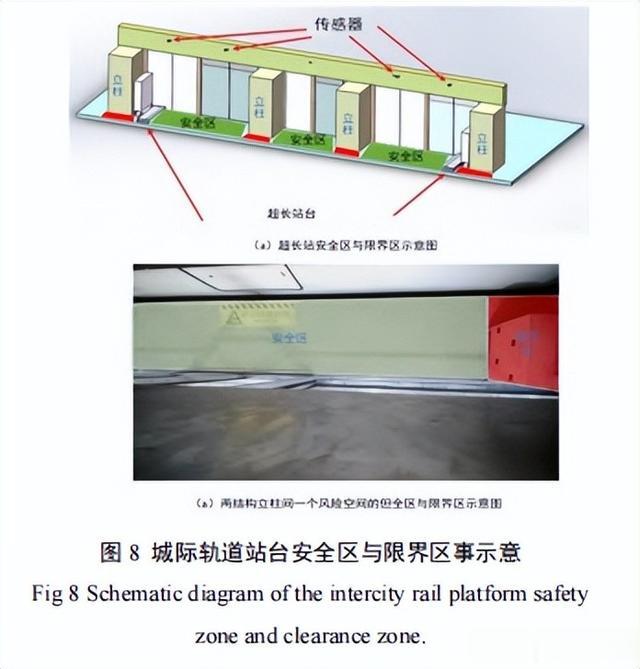
城际站台与列车间长230~460m,宽1.2~2.0m,高2.0~1.5m的立体区域为超宽超长的连续风险空间,该立体区域通常存在20多个内置的结构立柱,形成单独的间隔区域以便乘客上下车。
根据站台限界安全要求,站台门的结构立柱边缘到站台边缘无法通过设置固定栅栏来阻拦乘客进入站台门端头或端尾的禁行区(图8中红色区域)。
例如,列车在站时人员可能存在越过图8中绿色安全区域的边界线,进入结构立柱所在的红色限制性区域。轻生旅客也可能故意走到车头翻越栏杆跳入轨行区。
为保证列车行驶安全和乘客的生命财产安全,智能化安全监控系统需主动检测或跟踪乘客在风险区域的行动轨迹,对乘客的非法行为及时报警,以便后续工作人员的处理。
城际站台的超长,超宽区域的越界检测要求主要有:检测精度高、无检测盲区,全时域实时监测,在出现安全事故时,系统需具备更好的可视性,方便工作人员远程视频确认、取证和事后视频追溯。

«——【·结语·】——»
通过与激光传感器,侧装式视觉传感器的对比分析,确定顶装式视觉传感器在城际铁路风险空间中的优越性。

城际铁路异物检测,乘客异常行为检测,人员越界检测3个任务的具体需求,分析深度学习在以上任务中的适应能力。
2个针对城际铁路异物检测和乘客异常检测的算法,并与现有的其它先进技术进行比较。基于图像修复的城际铁路异常检测算法实现99.32%的检测精度,检测时间为15ms。
基于骨架识别的异常行为检测算法实现对跌倒,行走,弯腰,下蹲等行为的检测,并达到91.7%的平均检测精度,为未来城际铁路站台门与列车间的风险空间异常检测研究与工程应用提供新思路。
