话说,「纯视觉+端到端」能代表智能驾驶的未来吗?未来如何?不知道的!甚至未来会不会有真正意义上公开道路的完全放开的纯自动驾驶驾驶也不知道。

如果一定要预测的话。纯视觉+端到端的可能性确实不小。就是单纯的觉得,如果要纯自动驾驶的话,其中一条简单粗暴的切入点就是:
人怎么开,机器就怎么开。
从感知、规划、决策、执行都逆向仿生。才更可能让自动驾驶在实际能力超过人类之后,跨过“恐怖谷”。这纯视觉+端到端,可能是最接近逆向仿生人类驾驶的技术线路。
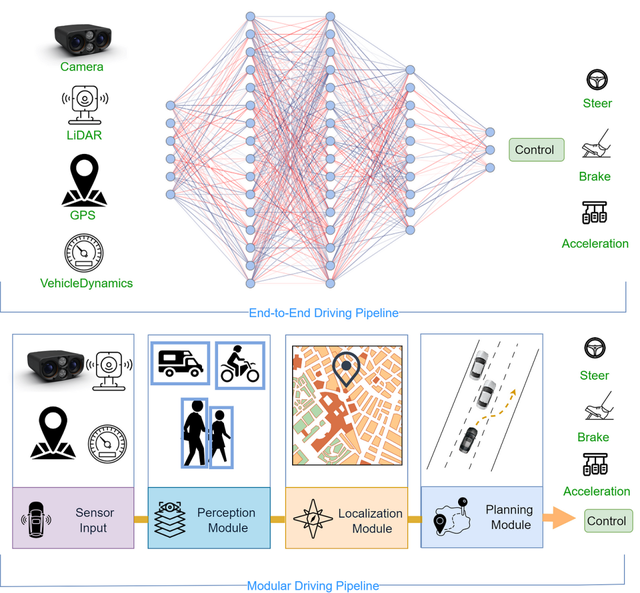
纯视觉:感知的逆向仿生
就是通过摄像头来看,看行人、车辆、交通信号、道路标志。所有Capture到的东西是第一优先程度的判断要素。然后算法根据这些像素点,辅佐一些最小必要的传感,去规划与决策。

端到端:规划决策的逆向仿生
就像是全托管了。车主要做的就是告诉车子目的地。端到端”意味着从开始到结束,汽车的计算机系统负责处理所有的任务。比如,当你告诉汽车你想去哪里,计算机就会理解你的指令,然后自己规划路线,识别路上的障碍物,控制汽车的加速、刹车和转向,直到把你安全地送到目的地。这个过程不需要人为干预,也不需要其他系统的协助。
不过,切入点虽然简单粗暴。要实现的过程其实是难度相当大的。
往往最简单的道理,推导验证的过程却是最为复杂的
虽说,人类开车虽说80%以上的决策信息来自眼睛。但是:耳朵听到的、身体感受到的、甚至加上那神奇的第六感。加在一起才是人感知的全部,是进化了多少年后,才形成的最小必要系统。
这个真的能够通过传感器和算法,1:1的逆向仿生出来吗?我持谨慎乐观的态度。
又虽然,现在的自动驾驶。拆解到每一个动作,机器都可以做得比人类更精准,更高效。但是放进真实的驾驶环境中,有多少是真无接管的,又有多少是真无需接管的。
现有的训练数据基本上已经被算法吃完了。进入的平坦的学习曲线。是不是真的单车采集数据回传变成Big、Mega、Giga Data后,还能迎来二次的学习曲线陡然爬升。我同样持谨慎乐观的态度。

所以:才会不断的做加法,高精地图、多传感器融合等。才会画出5个等级来,让自动驾驶这件事相对的循序渐进。让,自动驾驶相对的先能够可用起来。
一直,很希望坐到一台,如果我闭着眼睛的话:分辨不出来是人开的还是机器开的车。
不是自动驾驶领域的,一点粗鄙的看法,供讨论,求被教育。
